INF1900
Projet
initial de système embarqué
Travail
pratique No. 1
Introduction
à la carte mère et à SimulIDE
Objectif:
Faire les premiers pas avec la programmation d’un microcontrôleur
et effectuer le sertissage de fils
Durée:
Une semaine
Travail
préparatoire: Lecture de certains documents du site web du cours
Documents
à remettre: Aucun.
Présentations
en classe:
«Ce
n’est pas le rôle de l’entraîneur de motiver les joueurs.
Les inspirer, oui. Les motiver? Non.
La
clé pour gagner, c’est d’embaucher des joueurs qui sont
intrinsèquement motivés par la victoire. Un entraîneur ne peut
pas transmettre artificiellement sa motivation. Elle doit venir
des joueurs eux-mêmes.
J’ai
toujours pensé que chaque entraîneur devait diriger son équipe
en étant authentique. Pour cette raison, j’ai toujours parlé
aux joueurs avec mon cœur. Je disais ce que je pensais qu’il
fallait pour gagner des matchs.
Je
n’ai jamais prononcé de grand discours de motivation. Je n’ai
jamais demandé à mes joueurs s’ils avaient la volonté de
gagner. Je préférais leur demander s’ils avaient la volonté
de se préparer pour gagner.
Car
si vous n’êtes pas prêt à faire tous les sacrifices pour
vous préparer, vous ne gagnerez pas.»
|
-
|
Marv Leavy
entraîneur-chef
des Alouettes de Montréal pendant 5 ans, puis dans la NFL
pendant 17 saisons avec les Chiefs de Kansas City et les Bills de
Buffalo.
|
Sertissage
des fils
Le
premier laboratoire a une certaine forme de préambule qui est
d’arriver à compléter l’assemblage de petits câbles dit «à
deux positions» par la réunion de deux fils multibrin de couleurs
différentes. L’assemblage demande de prendre à la serre un
morceau de métal très petit au bout d’un fil dénudé avant de
l’insérer dans un réceptacle noir prévu pour le recevoir pour
ainsi obtenir un câble pouvant être utilisé dans des situations
variées avec le robot.
Il
faudra regarder la vidéo sur le sertissage, la quatrième
ici dans la liste de celle pour le montage (ou encore sur
YouTube).
Par la suite, on pourra suivre ce qui est à
réaliser dans les opérations de sertissage.
Il vous
faudra des pinces ainsi que le matériel nécessaire. Le chargé de
laboratoire pourra vous fournir le tout, à votre première ou
deuxième séance de laboratoire cette semaine.
Premier
programme et compréhension générale du système
La
première étape sera d’installer
les outils nécessaires au cours. Il
faudra lire certains documents pour comprendre la carte
à microcontrôleurs et la programmation
des microcontrôleurs AVR. La lecture des documents est
essentielle pour ce travail pratique, mais aussi pour ceux à venir.
Il faudra aussi comprendre
comment fonctionne le simulateur
SimulIDE. Lire uniquement les sections «SimulIDE» et
«Utilisation de SimulIDE».
De plus,
il suffit d’utiliser le câble
USB pour alimenter électriquement la carte. Ce câble servira
aussi à programmer la carte.
Il n'est pas nécessaire de comprendre les appareils de laboratoire
pour l'instant, car ils seront introduits dans les semaines
suivantes, quand le contexte sera plus favorable.
Comment,
au minimum, comprendre comment fonctionne le robot ? Pour
débuter avec le robot en offre une partie de l’explication.
Par contre, il
faut noter que la partie motrice du robot (par le pont-en-H) sera
plutôt abordée dans les semaines à venir. On pourra
donc y revenir plus tard même
si votre curiosité peut vous pousser à le parcourir dès
maintenant.
Pour
voir si l’installation des logiciels a mené à un système qui
fonctionne bien, tout en prenant contact pour la première fois avec
le simulateur, il convient de commencer le travail de programmation
par des exercices simples. Le premier consistera à allumer et
éteindre des diodes électroluminescentes (DEL) pour s'initier aux
sorties. Pour ce qui est des entrées, un simple bouton-poussoir
sera utilisé.
Pour
arriver à programmer le microcontrôleur, il faudra commencer par se
familiariser avec sous
Linux.
Environnement
de programmation
Le
microcontrôleur reste fondamentalement un processeur. Il peut donc
être programmé comme n'importe quel autre système à
microprocesseur, comme un ordinateur personnel par exemple.
Cependant, à la différence d'un ordinateur de bureau, il ne vient
pas avec un clavier, un écran et une souris, ce qui le rend un peu
difficile d'accès. Pour arriver à lui donner des instructions, on
peut utiliser un compilateur courant, tel GCC par exemple. On
compilera le code sur un PC de la même manière dont on le ferait
pour le développement d'une application Windows, Linux ou Mac. La
seule différence est que le fichier exécutable produit sur le PC
doit être téléchargé sur le microcontrôleur. Le PC ne peut
d'ailleurs même pas exécuter le fichier binaire directement, car
les jeux d'instructions du microcontrôleur et du microprocesseur du
PC sont différents et incompatibles. Techniquement, on dit d'un tel
compilateur qu'il est un compilateur croisé (cross-compiler
en anglais) puisqu'il génère des fichiers binaires pour une
plate-forme différente de celle sur laquelle il évolue lui-même.
Dans le
cas qui nous concerne, nous travaillerons sous Linux en employant GCC
pour compiler. Que l’on utilise la carte mère ou le simulateur,
il y a peu de différences dans les étapes à suivre de sorte qu’on
donnera ici la procédure à suivre pour les deux tout en soulignant
les différences uniquement lorsque nécessaire. On vous encourage à
maîtriser les deux outils. On peut tout de même arriver à la
compilation du code sans aucune différence entre les deux façons de
faire. Ce n’est que le chargement de l’exécutable dans le
système et l’exécution qui diffère légèrement par la suite.
L’éditeur:
Sauvegarder
le fichier
C/C++ qui suit sous un certain nom dans un répertoire de votre
choix. Il vous faudra prend
l’éditeur VS
Code pour pouvoir regarder le
contenu de ce fichier. Vous pouvez prendre le temps qu'il faut pour
installer et voir
comment fonctionne Visual
Studio Code, si c'est la
première fois que vous utilisez cet éditeur pour l'édition de
fichiers de code source. Une fois dans l’éditeur,
il vous sera possible de facilement ouvrir un fichier. Il est à
noter que l'utilisation du signe de pourcentage (%)
sert à indiquer l'invité
(prompt)
d'un terminal sous Linux. Il
n’a donc pas à être retapé dans la console.
Vous taperez donc ce qui suit dans l'interpréteur de commandes
(shell
en anglais). Si vous ne le connaissez pas, voir site
pour entreprendre votre étude des commandes de base en Linux.
Cependant, la page sur les
éditeurs
sous Linux vous donne aussi quelques ressources supplémentaires.
Ceci démarrera donc l’éditeur
VS-Code au bon endroit
si vous vous trouvez dans le
même répertoire où vous avez déposé le fichier C/C++:
%
code &
Le
Makefile:
Maintenant
que vous avez reconnu qu'il s'agissait bel et bien de code en C dans
le fichier source, il faudra le compiler. Prendre
ce
fichier Makefile
et le déposer dans
le même répertoire. L’ouvrir
avec VS Code. Ce Makefile peut
sembler compliqué vu son caractère très général, mais nous avons
3 lignes à adapter pour arriver à compiler à peu près n'importe
quel fichier source simple. Changer la fin de la ligne commençant
par PROJECTNAME pour placer le nom du fichier exécutable que vous
voulez obtenir une fois la compilation terminée. Ce pourrait être,
par exemple, test32bits.
Un peu plus bas, dans le Makefile, à la ligne débutant par PRJSRC,
placer le nom du premier fichier source de l'étape précédente au
lieu de celui qui est inscrit. Remonter plus haut dans le fichier
et changer la variable MCU pour indiquer le type de microcontrôleur
que l'on souhaite programmer soit atmega324pa
dans notre cas. Il se peut qu'il n'y ait rien à changer.
Compiler
le code:
Il faut
maintenant compiler et charger le programme. Une façon de faire
pourrait être de taper les longues lignes des commandes pour chacun
des programmes à appeler. Cette façon de faire est longue et
fastidieuse en plus d'attirer facilement les erreurs. Le Makefile
établi précédemment nous simplifie la tâche puisqu'il fait tout
pour nous. On tapera donc la commande suivante et on lira les
messages affichés à l'écran.
%
make
Le
simulateur et/ou la carte:
On
a déjà un code compilé sans avoir eu recours ni à la carte mère
ni au simulateur. Les opérations se séparent à partir d’ici.
Pour
le simulateur :
Partir
le simulateur SimulIDE et charger
le fichier de matériel .simu.
La configuration matérielle
déjà en place permettra de faire tourner le code précédemment
chargé.
Pour
la carte mère :
Relier
la carte mère au PC avec un câble USB. Prendre un câble à deux
positions serti. Il doit avoir ses deux bouts femelles. Brancher un
bout sur le connecteur IDC de la section «Del libre» de la carte
mère. Brancher l'autre bout sur les broches 1 et 2 du port C.
Chargement
de l’exécutable:
Pour
le simulateur:
Il
faudra par la suite charger le fichier .hex généré dans le
processeur (clique-droit sur le processeur et «load firmware» par
la suite). Démarrer la simulation en cliquant sur le bouton prévu
dans la barre du haut en rouge.
Pour la
carte mère :
Le
Makefile établi précédemment nous simplifie la tâche puisqu'il
fait tout pour nous. On tapera donc la commande suivante et on lira
les messages à l'écran. Le Makefile appellera le chargeur AVR Dude
pour effectuer le transfert de l’exécutable vers la carte par USB:
%
make install
Observation
du comportement:
Normalement,
dans le simulateur ou sur la carte mère, les DEL devraient commencer
à scintiller directement si tout se passe bien. Si le premier make
n'a pas passé, il faut penser que la source du problème est
probablement dans le Makefile puisque c'est le seul fichier qui a été
édité (à moins que vous ayez introduit des caractères par
accident en consultant le fichier source). Une autre possibilité
pourrait être un problème avec une mauvaise installation de AVR-GCC
ou du programme make lui-même.
Le
simulateur présente des DEL sur plusieurs ports alors que pour la
carte mère, leur nombre est plus limité. Tout de même, sur la
carte mère, déplacer le câble à deux positions des broches 1 et 2
du port C vers d'autres paires de broches adjacentes sur d'autres
ports au fur et à mesure pour explorer un peu ce qui se passe.
Essayer
de comprendre ce que vous observez du comportement de la DEL et du
code que vous avez. Pouvez-vous y voir un lien avec votre
additionneur binaire matériel de INF1500 réalisé avec des portes
logiques (demi-additionneur
et additionneur complet) avec propagation de la retenue ?
Pour
une recompilation depuis le départ:
Si vous
voulez refaire les étapes de compilation précédentes, mais pour
d'autres fichiers sources, il suffit de modifier la variable PRJSRC
dans le Makefile à chaque fois. Lors d'un changement de fichier
source, il est nécessaire de faire le nettoyage des fichiers
intermédiaires produits durant le processus de compilation ce qui se
fait avec la commande suivante:
%
make clean
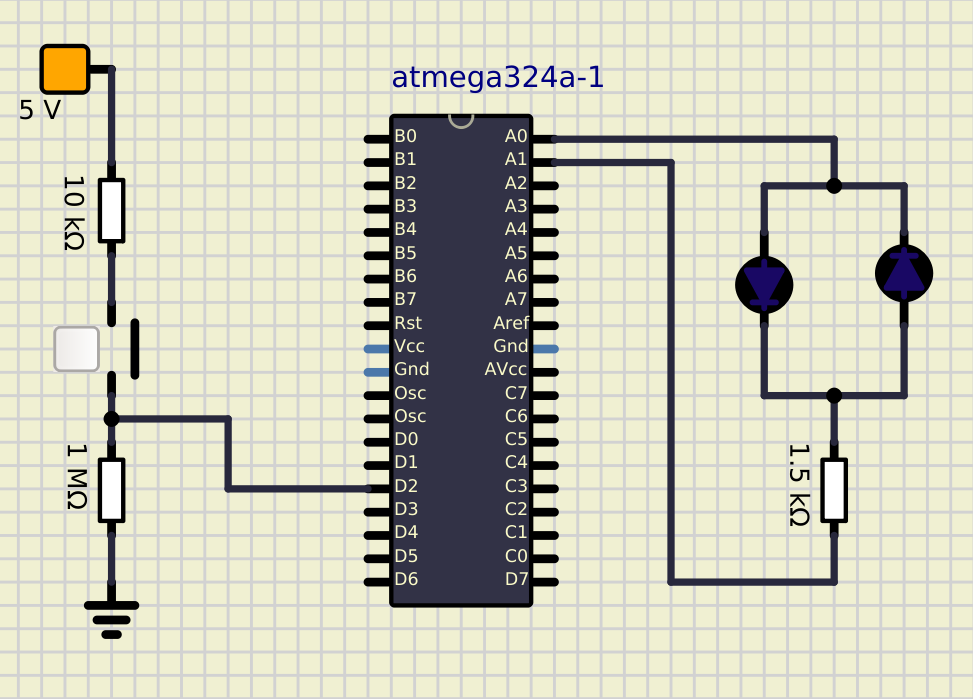
Contrôle
d'une DEL
Il
faudra reproduire le circuit suivant dans SimulIDE. Noter que les
DEL peuvent être reliées à deux broches consécutives du port que
vous souhaitez utiliser (n’importe quel, sauf peut-être le port D
pour l’instant), tant que vous en tiendrez compte dans le code à
écrire qui suivra. L’interrupteur doit obligatoirement être
relié au port D2 pour des raisons qui deviendront plus claires d’ici
quelques semaines. Il faudra sauvegarder ce circuit dans un fichier
ayant l’extension .simu comme dans l’exemple et le placer
préférablement dans le même répertoire que celui dans lequel vous
placerez aussi votre code C/C++. Il est important de noter que le
nom du fichier que vous choisirez ne doit absolument pas contenir
d’espace, car SimulIDE aura de la difficulté à le recharger par
la suite. De toute façon, aucun fichier ce code source que vous
écrivez ne devrait contenir d’espaces ou de caractères avec
accents. C’est une mauvaise pratique.
Si
l’exercice est fait sur la carte mère, il est à noter que la DEL
libre à usage général sur la carte est bicolore. Il est donc
possible d'afficher une couleur différente en changeant la polarité
de la tension appliquée à ses bornes tout comme le circuit réalisé
dans le simulateur le permet. Du point de vue du matériel, c’est
le même circuit et le même code va produire le même comportement
dans le simulateur et sur la carte mère.
Il faut
maintenant écrire un peu de code et faire faire à une DEL ce que
nous voulons que ce soit dans le simulateur ou sur la carte mère. Il
est à noter que la double-DEL libre à usage général dans le
circuit prendra une couleur ou l’autre selon le sens du courant qui
la traverse. Il est donc possible d'afficher une couleur différente
en changeant la polarité de la tension appliquée à ses bornes.
Prenons un exemple. On a décidé de relier les broches A0 et A1 du
port A du microcontrôleur aux deux broches de la double-DEL mais on
aurait pu prendre deux autres broches. En plaçant en sortie les
combinaisons 01 et 10 sur A0 et A1 du port A, on obtient des couleurs
différentes de la DEL (vert et rouge). Toute autre combinaison
n'entraînera pas de chute de tension dans la DEL et donc aucune
couleur ne sera émise par cette dernière. Sur une vraie carte mère
physique, par contre, un changement rapide et répété de polarité
sur A0 et A1 arrivera à confondre l'oeil et donnera l'apparence
d'une couleur ambrée (jaune foncé) si la DEL est réellement de
type bicolore. Évidemment, sur la carte mère, le câble à deux
positions doit être utilisé pour relier la DEL libre aux deux
premières broches du port A pour avoir un circuit équivalent à
celui du simulateur.
L'exercice
consiste à faire allumer la DEL de chaque couleur pour quelques
secondes. On affichera d'abord la couleur rouge, puis la couleur
verte puis la couleur ambrée. On répétera cette séquence à
l'infini. Pour ce faire, il faut prendre en considération les
aspects suivants:
Il
faudra utiliser le fichier include arv/io.h, car il faut effectuer
un travail sur les entrées/sorties du microcontrôleur. Pour vous
aider dans votre programmation, il faudra consulter des sections de
la documentation sur la librairie AVR LibC, surtout les sections
«Special function registers» et «Standard Integer Types» dans
«Library Reference» de la documentation.
L'utilisation
de type uint8_t serait souhaitable puisqu'on travaille avec
un processeur de 8 bits.
Il
faudra introduire des délais importants en plusieurs endroits dans
le code puisque l'AVR travaille à une vitesse de 8 Mhz ce qui est
énorme à l'échelle humaine. L'AVR peut faire des millions
d'instructions durant une seconde. Il faut donc lui faire perdre
beaucoup de temps. La section «Busy-wait delay loop» vous sera
très utile.
Bien
entendu, régler la vitesse du ATMega324 à 8 MHz (clique-droit sur
le processeur et l’option «Properties» dans le menu. Le
changement peut se faire dans la colonne de gauche de l’outil par
la suite.
Il
faudra ajuster un port A du circuit pour qu'il soit en sortie ce qui
nécessite l'ajustement du registre de configuration de ce port
(DDRA). Ce port doit être celui choisi pour relier les DEL dans le
circuit entré dans SimulIDE précédemment.
Il
faudra avoir une boucle infinie pour répéter la séquence.
Il
serait souhaitable de s'inspirer des exemples fournis à la section
précédente pour écrire votre propre code.
Si
les opérations sur des bits en C/C++ est un concept inconnu pour
vous, consulter rubrique
Wikipédia pour en savoir
plus sur la question.
Interrupteur
La carte
comporte également 2 boutons-poussoirs. Le premier est le plus bas
sur le bord gauche de la carte. Son activation provoque une remise à
zéro (reset) du microcontrôleur ATMega324PA. Le second,
situé plus haut, est pour usage général. Il est relié à la
sortie D2 s'il y un cavalier sur IntEN qui est juste sous
l'interrupteur. La sortie D2 peut également être configurée pour
servir d'entrée à une interruption externe (au sens microprocesseur
du terme, concept qui sera abordé dans quelques semaines).
Reprendre
intégralement le circuit de l’exercice précédent si vous faites
l’exercice avec le simulateur, mais cette fois, nous utiliserons
l'interrupteur pour servir d'entrée au programme. Alors que
précédemment les couleurs changeaient automatiquement après un
certain délai, il faut maintenant attendre de recevoir une commande
de l'interrupteur pour provoquer le changement de couleur.
Les
interrupteurs de type bouton-poussoir tels que ceux d’une vraie
carte mère physique ont une nature mécanique au sens où des pièces
de métal doivent venir en contact pour provoquer la fermeture d'une
boucle dans le circuit. Étant donnée la nature élastique du métal
de l'interrupteur, un tel contact ne se fait pas instantanément, tel
qu'on serait porté à le penser. Les morceaux de métal risquent
fort de rebondir l'un sur l'autre durant quelques millisecondes avant
que le contact demeure stable entre les deux. Le moment où le
contact s'établit est donc un concept plutôt flou. Il est donc
important de prévoir un mécanisme dit d'antirebond («debouncing»
en anglais) pour établir plus clairement à partir de quel moment un
contact a eu lieu dans le temps. Il existe plusieurs techniques pour
arriver à préciser le point dans le temps et éviter que le
microcontrôleur interprète plusieurs transitions sur l'interrupteur
comme autant de changements de signal alors que l'utilisateur n'a
appuyé sur le bouton qu'une seule fois!
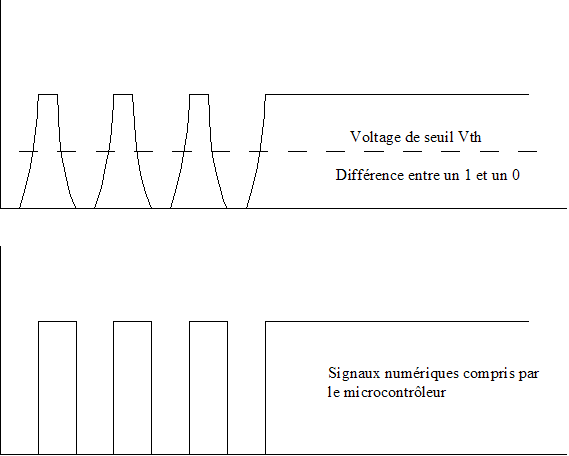
Signal
sans antirebond (haut) et son interprétation possible par le
microcontrôleur
Une
façon de faire est d'utiliser une bascule («latch») qui verrouille
sa sortie dès que le seuil en entrée a été dépassé. Un
condensateur peut aussi être placé pour filtrer le signal de
l'interrupteur de façon à rendre la transition plus nette. Ces
solutions sont de nature matérielle. Il existe aussi une façon
toute simple d'arriver au même objectif en employant une méthode
logicielle. Il suffit d'effectuer deux lectures consécutives (ou
plus si l'on est vraiment nerveux!) du signal, mais séparées dans
le temps d'un intervalle jugé approprié. Si la seconde lecture est
à la même valeur que la première, on peut confirmer que le signal
est stable. Un délai de 10 millisecondes est souvent utilisé dans
les cas les plus courants pour s'assurer d'une bonne lecture.
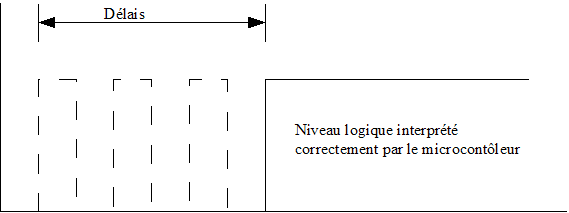
Antirebond
de façon logicielle
L'exercice
consiste encore à allumer la DEL. Toutefois, les changements seront
commandés par l'utilisation du bouton-poussoir Interrupt du
circuit. Ainsi, chaque fois que l'utilisateur appuie sur le bouton
(avec la souris...), la DEL tourne à la couleur de votre choix et
demeure dans cette couleur tant que le bouton n'est pas relâché.
Lorsque le bouton est finalement relâché, la DEL s'éteint.
Quelques consignes avant de programmer:
S'assurer
de la présence d'un cavalier
(jumper)
sur IntEN sur la carte mère. Cette opération n’est pas
nécessaire avec le simulateur.
Avoir
une fonction qui effectue une lecture du bouton-poussoir avec
l'antirebond effectué de façon logicielle
S'assurer
que le port D2 est configuré en entrée. Normalement, par défaut,
l'AVR considère chaque bit de chaque port comme étant en entrée,
mais il est toujours utile de s'assurer que c'est bien le cas (être
bien certain que DDRD est à la bonne valeur).
En
plus, pour lire d'un port configuré en entrée, il faut utiliser la
valeur prédéfinie PINx. Donc, pour savoir si le signal 2 du port
D est à 1, il faudra utiliser le masque 0x04 dans l’expression
qui suit. En se faisant, on pourra «isoler» (ou ne prendre en
compte si l’on préfère) que le signal 2 du port. Autrement, une
transition sur une autre broche du même port pourrait être
considérée valide ce qui n’est pas souhaitable ici:
if
( PIND & 0x04 )
Évaluation
Vous
pourrez montrer votre code au chargé de laboratoire si vous désirez
vous assurer de votre bonne compréhension de l'exercice. Il pourra
vous demander d'expliquer certaines parties de vos programmes et vous
aider au besoin. Aucun point n'est accordé pour ce travail, mais il
est nécessaire pour la suite du cours.
Remarque
très importante
Sur la
carte mère, les bits [4:7] du port B (broches 5, 6, 7 et 8) du
ATmega324PA sont utilisés par le ATmega8 lorsque ce dernier
programme le ATmega324PA lorsque la commande make install est
lancée pour que l'exécutable sur le PC se retrouve en mémoire
flash. Donc, si des périphériques branchés sur la carte
mère utilisent ces 4 bits les plus significatifs du port B, ils
peuvent nuire à la programmation de la carte mère (messages
d'erreur sur PC). Il n'y a pas de solution simple à ce problème.
Il est fort possible qu'on doive utiliser cette partie du port B.
Dans ce cas, il faudra peut-être débrancher ces périphériques à
chaque reprogrammation de la carte mère, ce qui est pénible...
Dans la mesure du possible, pour éviter cet inconvénient,
n'utiliser ces entrées/sorties que si la situation le nécessite
(parce que les autres ports sont déjà occupés par d'autres
périphériques). Le simulateur n’est pas affecté par cette
contrainte.
Le
saviez-vous ?…
Dans
VS-Code:
Dans un
terminal Linux:
On
peut toujours faire la commande «man» (pour manuel) suivie
du nom d’une commande pour avoir accès à une description de la
commande voulue et en apprendre plus sur les options possibles avec
celle-ci. Exemple : % man
ls
Assez
souvent aussi, on peut évoquer une commande avec soit l’option -h
ou l’option --help pour en apprendre plus également. Exemple: %
ls --help
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}