Explications
sur le fonctionnement du circuit du pont en H
Les
moteurs sont contrôlés par un circuit particulier appelé «pont en
H». Il faut quelques notions sur le fonctionnement des moteurs
électriques et des transistors pour bien comprendre son
fonctionnement. Son étude est donc hors du domaine d'intérêt de
l'ingénieur-informaticien. Toutefois, il y a quelques points très
intéressants qu'apporte ce circuit et qui méritent notre attention.
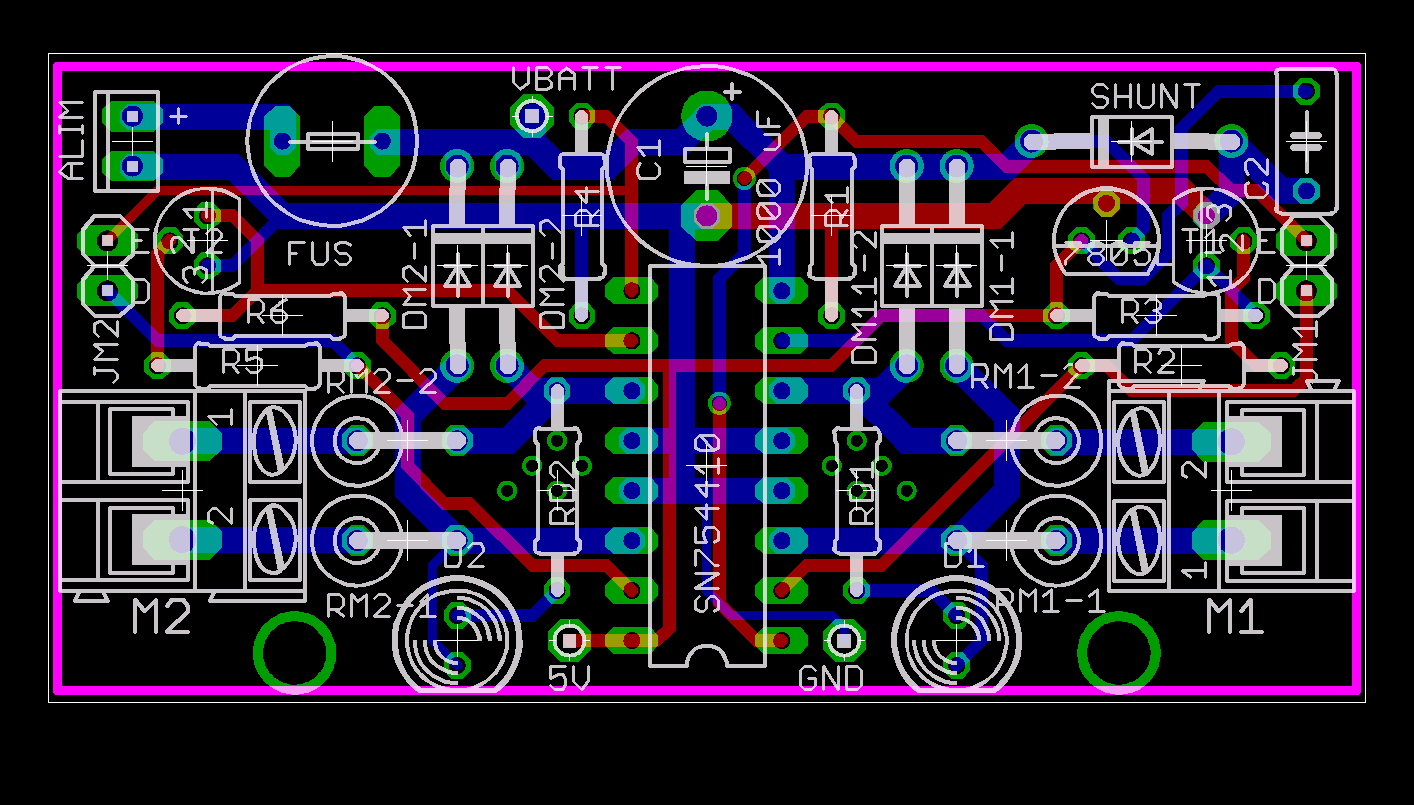
Une
grande
figure en format PNG donne le schéma électrique du circuit du
pont en H. La vue ci-dessous est une vue de la réalisation physique
du circuit (board level
view). Elle est donnée
uniquement pour situer certains composants et pour permettre de
brancher correctement ce circuit au reste du système. La
compréhension des autres détails n'est pas nécessaire.
Buts
de la présence d'un pont en H
Que fait
un pont en H? Les moteurs électriques nécessitent des courants
importants par rapport à ce que peut fournir un microcontrôleur.
Il est donc impensable de brancher directement les bornes d'un moteur
à une sortie du ATmega324PA. L'AVR serait brûlé instantanément,
car il peut fournir au maximum 10 mA alors qu'un moteur du robot peut
demander facilement 1A. Le premier rôle du pont en H est donc de
fournir de forts courants aux moteurs tout en permettant leur
contrôle par la carte mère.
Un autre
problème avec les moteurs est qu'on veut pouvoir inverser la tension
à leurs bornes pour changer le sens de rotation. Un robot qui ne
reculerait pas perdrait de son intérêt. Inverser le sens d'un
courant peut être réalisé par un bon agencement d'interrupteurs.
C'est exactement ce qui constitue la base d'un pont en H. Par
contre, il est souvent plus pratique d'utiliser des transistors à la
place d'interrupteurs pour réaliser des commutations. En plus de
son rôle de commutation, un transistor peut amplifier un courant et
est plus facile à contrôler par des signaux numériques ou
analogiques.
Un autre
problème dans le contrôle des moteurs est plus subtil. La vitesse
d'un moteur électrique n'est pas proportionnelle à la tension
électrique à ses bornes. Le moteur demande une tension minimale
assez importante pour démarrer. Si cette dernière est trop basse,
les forces électromagnétiques ne sont pas suffisantes pour
combattre le frottement. Il devient donc difficile d'ajuster la
vitesse de façon précise.
La
solution à ce problème est astucieuse. Il suffit de fournir au
moteur une tension qui est toujours la même soit la tension
maximale! Par contre, cette tension ne sera appliquée que par très
courtes périodes de temps. En ajustant la longueur de ces périodes
de temps, on arrive à faire avancer plus ou moins vite les moteurs.
Mieux, on remarque que la vitesse des moteurs devient proportionnelle
à la longueur des périodes de temps. Contrôler la longueur des
périodes passées à la tension maximale par rapport au temps passé
sans application de tension (tension nulle) est donc le coeur de la
solution. En réalité, cette solution est fort connue en contrôle
des systèmes et en électronique et elle porte le nom de PWM (Pulse
Width Modulation). Il s'agit d'une forme de signal qui sera
étudiée en travaux pratiques.
Un
signal PWM n'est pas généré par un pont en H. Le PWM est même un
concept distinct de celui du pont en H. Par contre, le fait qu'un
pont en H soit constitué de transistors le rend particulièrement
apte à être contrôlé par un signal PWM. On doit donc voir le
couple PWM et pont en H comme un outil particulièrement efficace
pour arriver à contrôler des moteurs électriques.
Quelques
sites offrent de bonnes explications sur le fonctionnement général
du pont en H. Cette
explication simple sur
Wikepedia est complète et
suffisante. Plus sérieusement, on trouve ici
des détails intéressants pour les gens qui veulent aller plus loin.
Au-delà
du principe de fonctionnement d'un pont en H, il y a une remarque
importante que l'ingénieur-informaticien doit garder en tête. Dans
tout système complet, il est très important de séparer les parties
de contrôle et de puissance. Dans notre cas, le circuit du pont en
H offre une interface numérique qui est compatible TTL. On peut
donc brancher une sortie du ATmega324PA sur les entrées du circuit
du pont en H sans craindre d'endommager la carte mère. Les
interfaces sont compatibles et bien définies. Il n'y a aucune
cohabitation des tensions du système de contrôle (de la carte mère)
et celles de puissance (pour les moteurs). Il s'agit d'une règle de
conception qui évite toute possibilité de catastrophes. Avec des
tensions plus élevées à contrôler ou dans des situations
critiques, il arrive même que l'interface se réalise avec des
octocoupleurs. L'usage de lumière garantit qu'aucun morceau de
métal ne relie les deux parties. Il y a aussi fort à parier que
l'établissement d'un tel genre d'interface prendra forme lors d'une
discussion entre les ingénieurs-informaticiens d'un côté et des
ingénieurs-électriciens de l'autre d'où l'importance de notre
propos...
Utilisation
du pont en H
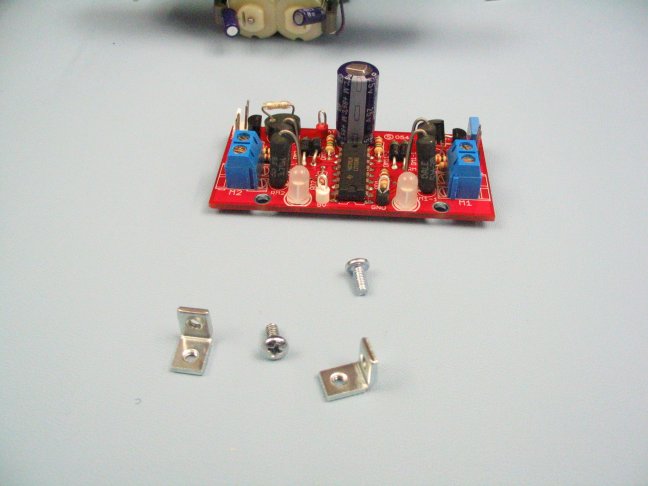
Il est
très simple de brancher le circuit du pont en H au reste du système.
Il y a essentiellement 3 types de branchement à effectuer. Le
premier concerne l'alimentation. On l'a dit lors des instructions de
montage, il faut brancher l'alimentation à l'aide d'un connecteur
AMP à deux positions. La masse est au bas et la tension
d'alimentation est au haut du connecteur. Une languette de plastique
polarise la connexion pour éviter un branchement dans le mauvais
sens.
Le
second type de branchement est celui qui permet de relier le circuit
aux moteurs. Encore ici, les instructions de montage ont été assez
claires sur le sujet. Il suffit de relier les fils soudés aux
bornes des moteurs aux connecteurs 5 mm à 2 positions. Il faut
viser fermement les vis sur le dessus de ces connecteurs pour que les
fils soient bien retenus dans les ouvertures latérales.
Le
dernier type de branchement est intéressant puisqu'il concerne les
signaux de contrôle. Pour chaque moteur, on veut pouvoir ajuster la
vitesse et préciser la direction de rotation. C'est pourquoi il y a
deux broches IDC de chaque côté du circuit. La broche du haut
(identifiée E pour «Enable») est celle pour le signal PWM.
Celle du bas est pour le signal binaire (0 ou 5 Volts) de direction
(identifiée «D»). Bien entendu, ces signaux proviendront des
ports de la carte mère.
À
partir de ces explications, on peut déduire qu'il existe deux façons
de régler le sens de rotation des moteurs. La première a été
mentionnée dans les instructions de montage. On peut tout
simplement inverser les fils retenus dans les connecteurs 5 mm à 2
positions. On peut considérer cette méthode comme une façon
matérielle d'atteindre le but. L'autre est plutôt logiciel
puisqu'elle peut se faire uniquement par programmation. Elle
consiste à inverser la valeur du signal de direction de la broche
«D». Ce qui est un 0 devient un 1 ou vis versa.
Composants
du circuit
Les deux
transistors 2N3904 sur le système sont en place pour offrir une
interface TTL
pour les entrées numériques du circuit du pont en H. Le 78L05
régule la tension d'entrée à 5V pour alimenter une partie
numérique du système.
Et la
puce au milieu? On pourrait réaliser un pont en H en utilisant
directement plusieurs transistors. Cependant, il est plus facile et
souvent plus économique d'utiliser un circuit déjà tout fait.
Dans notre cas, le SN754410
de Texas Instrument a été utilisé. Il coûte moins de 3 dollars
et convient parfaitement pour de petits moteurs CC. Bien d'autres
circuits similaires existent, mais ils sont souvent plus puissants et
peuvent contrôler des moteurs plus gourmands en courant. Ils sont
aussi beaucoup plus chers.
Deux DEL
au bas s'allument lorsque le circuit est en fonction. Elles sont
rouges pour indiquer une certaine direction et vertes pour indiquer
la direction opposée. Par contre, on ne peut déterminer si le
robot avance ou recule uniquement en regardant la couleur des DEL.
En effet, les fils qui se rendent aux bornes du moteur peuvent avoir
été branchés dans un sens ou dans l'autre. Il est donc possible
que les deux roues n'aillent pas dans le même sens même si les deux
DEL ont la même couleur. Il faut alors prendre un tournevis et
inverser les fils dans l'un ou l'autre des deux connecteurs 5 mm à 2
positions verts du pont en H pour régler le problème. Les deux
roues iront alors dans le même sens pour une même couleur des deux
DEL. Cependant, la couleur rouge pourrait alors apparaître pour
indiquer un mouvement vers l'avant et vert pour indiquer un mouvement
vers l'arrière. Ce n'est peut-être pas l'indication la plus
intuitive pour suivre les mouvements du robot. La convention
inverse: vert indique un mouvement vers l'avant et rouge un mouvement
de recul est probablement meilleure. Pour régler le problème, il
faut alors inverser les fils sortant des deux connecteurs 5 mm verts
du pont en H.
Par
ailleurs, de nombreuses diodes assurent qu'un courant inversé soit
bloqué et ne cause pas de dommage. Enfin, de grosses résistances
de puissance limitent le courant qui peut être consommé par les
moteurs si une roue venait à bloquer. Avec toutes ces protections,
on pourra donc utiliser le circuit sans être trop nerveux de
provoquer un court-circuit néfaste au système.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}