Montage
de capteurs sur breadboard
Le
breadboard est un support très flexible pour enficher des
composantes électroniques. On présente ici quelques situations où
son utilisation permet de relier rapidement quelques pièces sans
avoir à les souder sur un circuit imprimé.
Photorésistances
et boutons-poussoirs
Les
boutons-poussoirs blancs et carrés de même que les photorésistances
ont été utilisées durant les travaux pratiques précédents. Ils
seront de nouveau utiles. Cependant, il peut être important dans
certaines situations de les regrouper sur un seul breadboard.
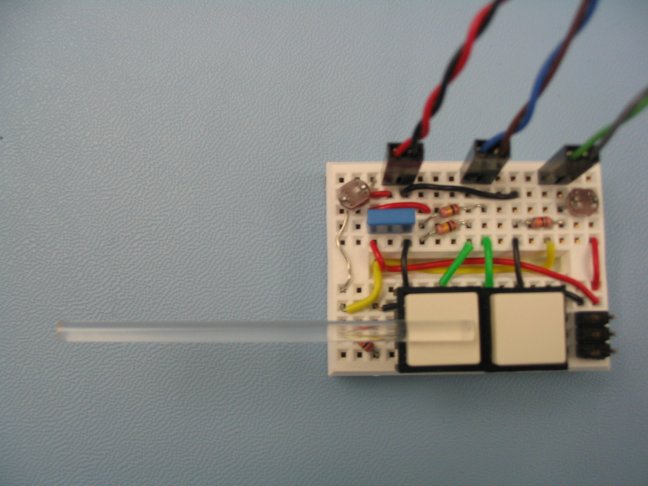
Les boutons-poussoirs pourront être utilisés pour démarrer ou
arrêter le robot. Ils pourront aussi être transformés en
pare-chocs avec l'ajout d'une tige transparente qui vous sera fournie
au besoin. Cette tige fermera le contact du bouton-poussoir
lorsqu'un obstacle sera rencontré. La photorésistance permettra de
concevoir un robot suiveur de lumière. La photorésistance pourra
aussi servir d'interrupteur. De cette façon, le robot pourra
répondre aux commandes d'une source d'intensité lumineuse.
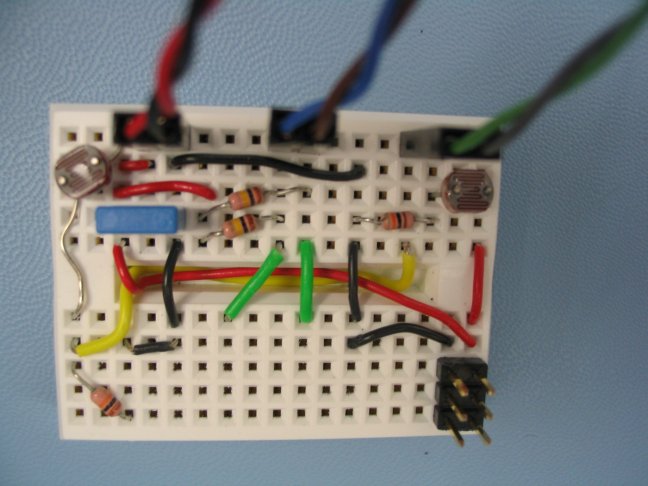
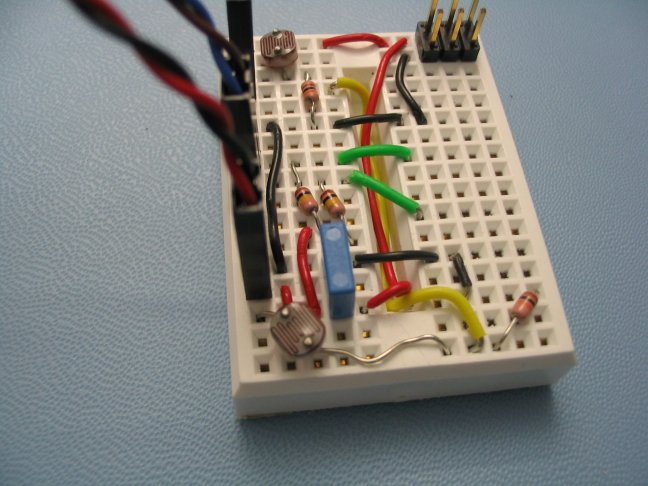
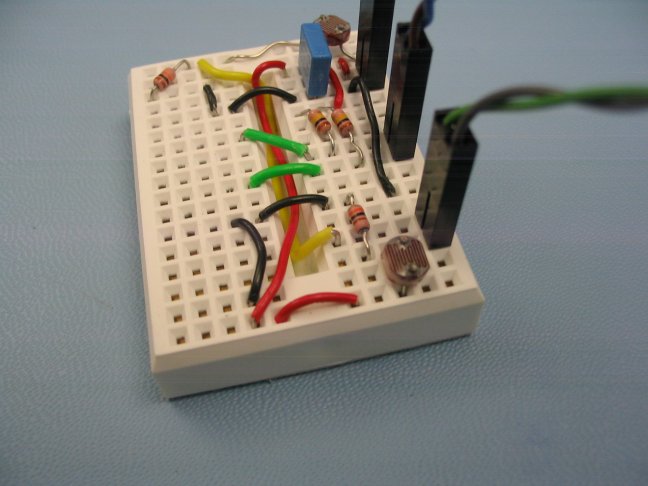
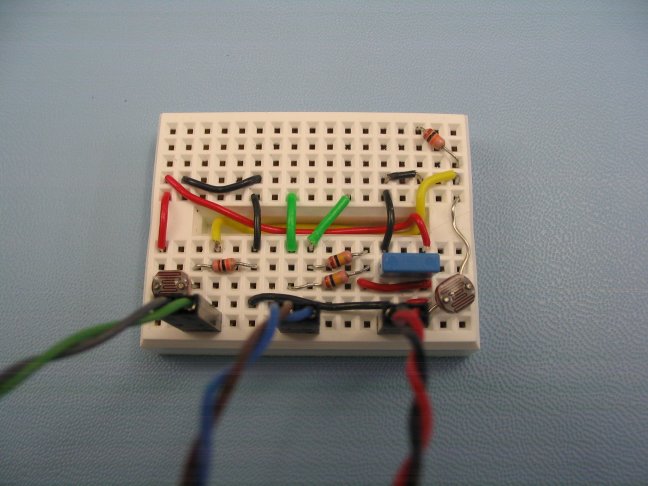
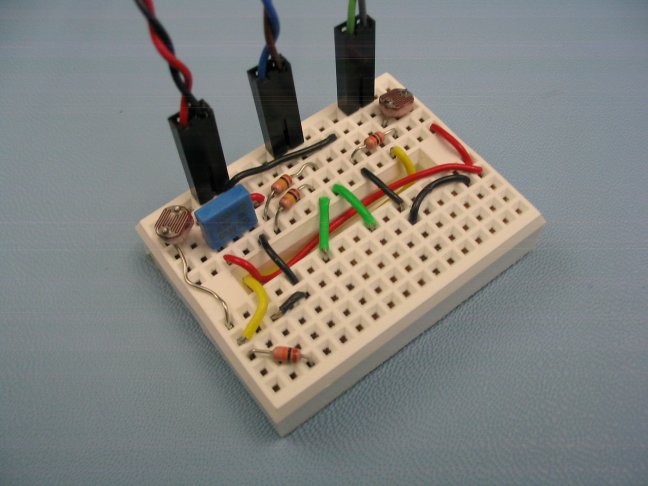
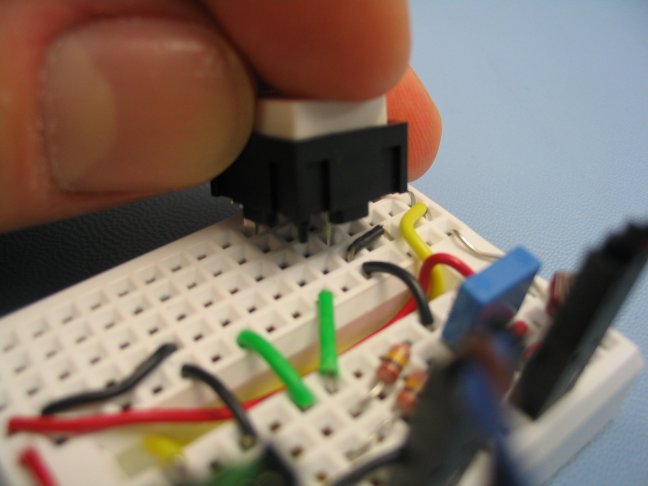
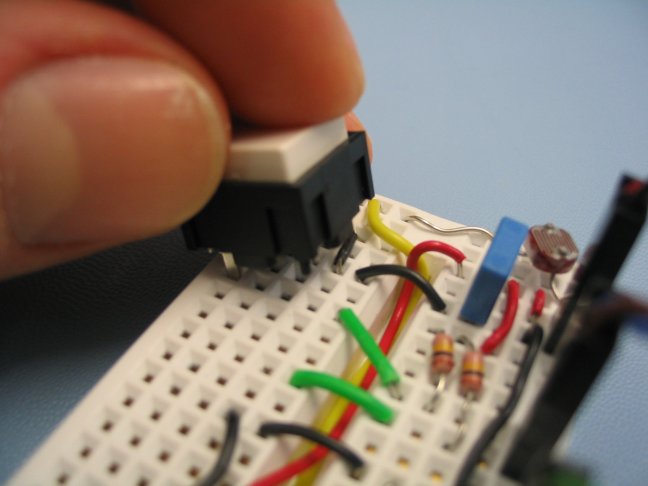
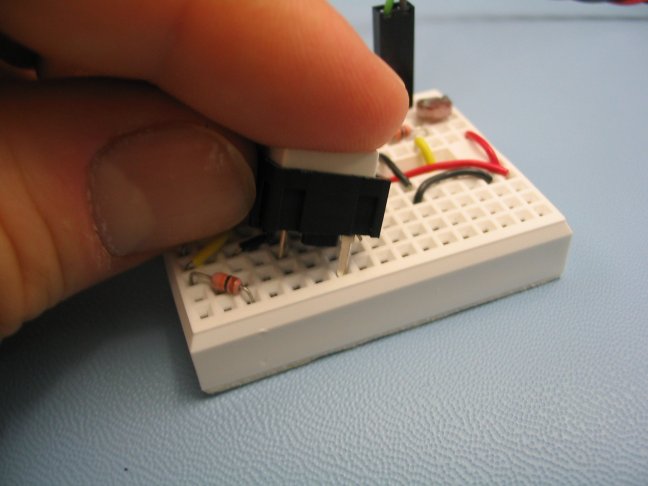
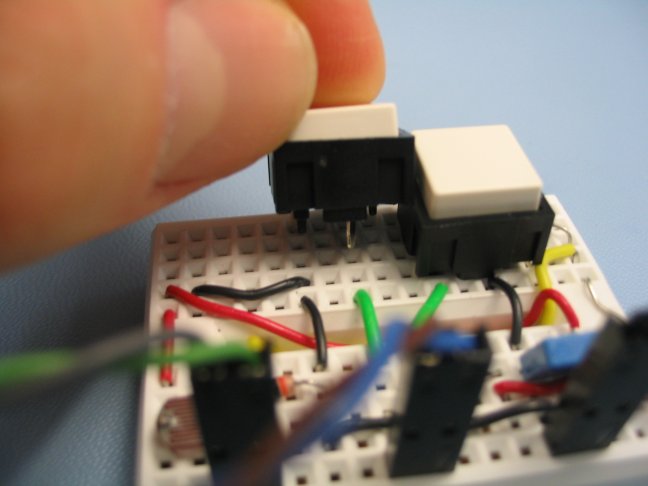
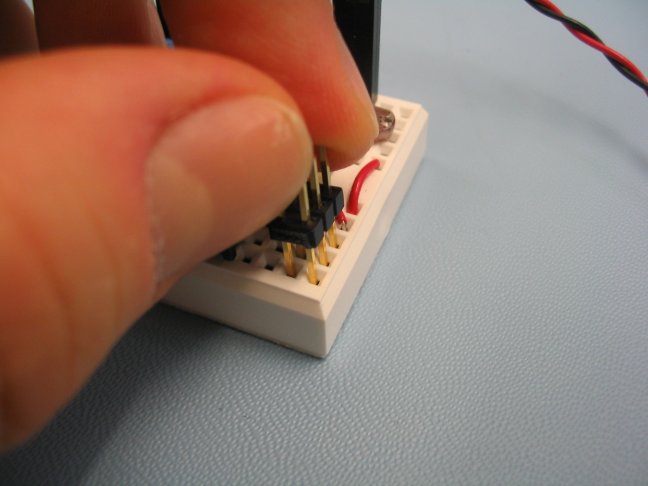
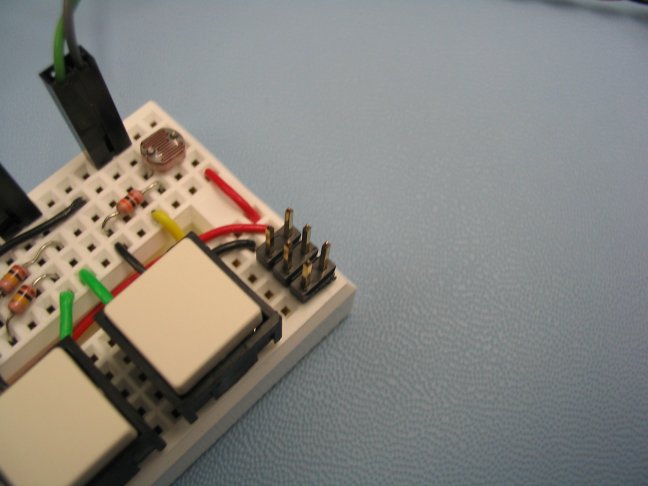
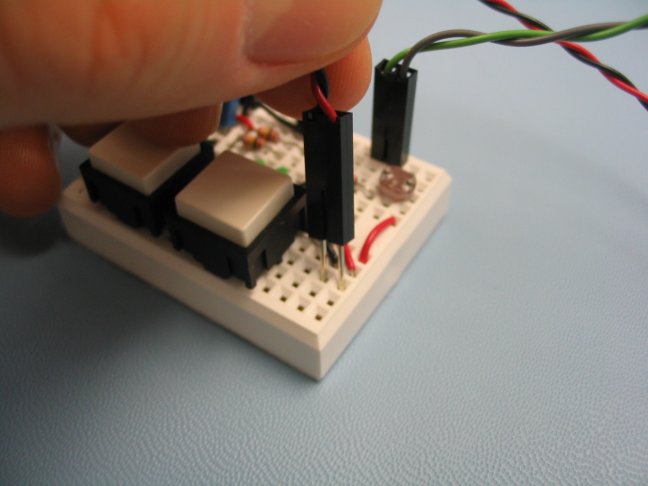
Les
photographies montrent comment disposer les fils pour arriver à
intégrer l'ensemble des composantes. De plus, on remarque que des
connecteurs IDC ont été ajoutés au breadboard dans le coin
inférieur droit. Ils permettent d'ajouter trois autres points
d'alimentation de 5 volts. Ils pourront être utilisés si les
quatre paires de broches Vcc et GND de la carte mère servent déjà
à alimenter d'autres capteurs. Une autre option est de retirer les
connecteurs IDC pour permettre d'enficher un câble avec un
connecteur Molex mâle à deux positions pouvant servir à alimenter
une partie du système. Sur le montage, tous les fils rouges sont à
+5 volts alors que les noirs sont à la masse.

Panasonic
PNA4602
Le
PNA4602 est basé sur une photodiode sensible à une lumière
infrarouge de 940 nanomètres. Cette photodiode est jumelée à un
circuit complexe qui permet l'amplification, le filtrage et quelques
autres opérations sur le signal d'entrée. Le résultat est un
photo-détecteur complet qui a une sensibilité maximale lorsque
l'infrarouge est émis par impulsions à 38 kHz. Comment arriver à
émettre des impulsions à cette fréquence dans l'infrarouge? Par
une simple diode émettant spécifiquement dans la longueur d'onde de
940 nanomètres et alimentée par un signal PWM à 38 kHz. La diode
Lite-On LTE 4208 est un émetteur convenable pour aller avec le
PNA4602. Ces composantes sont utilisées pour le fonctionnement des
télécommandes contrôlant des appareils électroniques tels que les
téléviseurs, les systèmes audio, etc.
On peut
utiliser le couple DEL émettrice et photo-détecteur de plusieurs
façons. Par exemple, on peut placer la DEL pour qu'elle envoie le
rayon infrarouge vers un objet de manière à provoquer une réflexion
pouvant être captée par le photo-détecteur. Cette approche
décrite dans le document de Parralax «Robot
Wall Sensors, Sound vs Light». Cette approche ne sera pas
utilisée ici puisqu'elle est à la base du fonctionnement du
détecteur d'objet à proximité de Lynxmotion décrit plus haut.
Nous
chercherons plutôt à utiliser la DEL et le photo-détecteur de
manière à établir une communication unidirectionnelle entre deux
robots. Un robot peut émettre avec la DEL alors que le second peut
détecter le message avec le photo-détecteur. Un protocole de
communication simple peut être basé sur la longueur des impulsions
à 38 kHz.
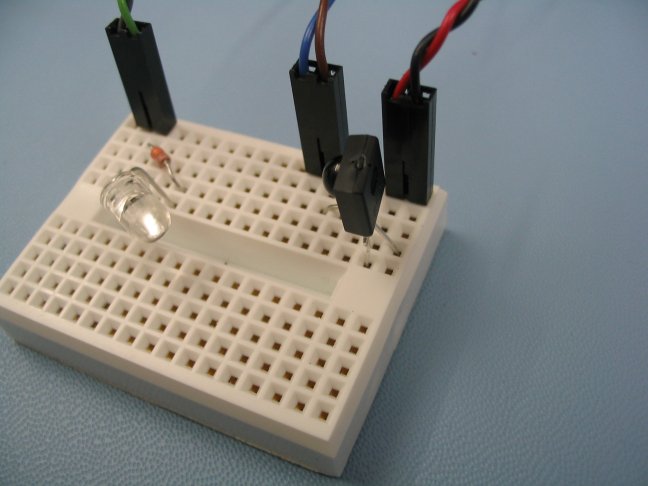
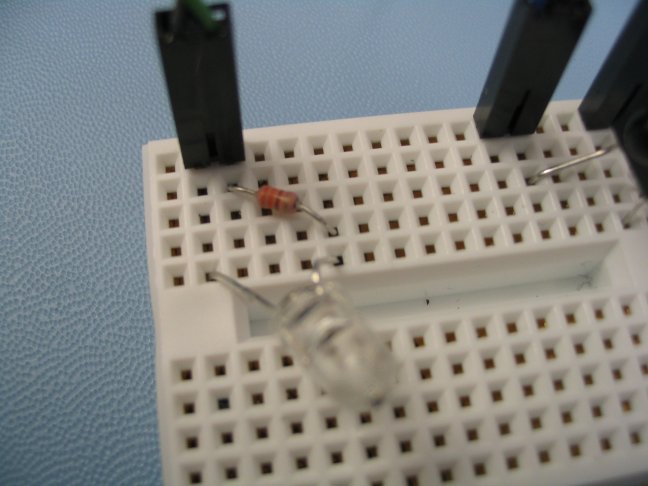
Les
photographies montrent la partie émettrice avec la DEL claire et la
partie réceptrice avec le photo-détecteur noir. Les deux
composantes sont photographiées sur le même breadboard, mais
les deux parties sont réellement distinctes et devront être montées
sur des robots différents. La diode est en série avec une
résistance de 330 ohms (orange-orange-brun pour le code de
couleurs). Le signal PWM arrive par le fil vert et retourne à la
masse par le fil gris. La broche courte de la diode (ou le côté
aplani de la base de la diode, la cathode) est en contact avec la
masse alors que la broche longue, l'anode, est en contact avec la
résistance.
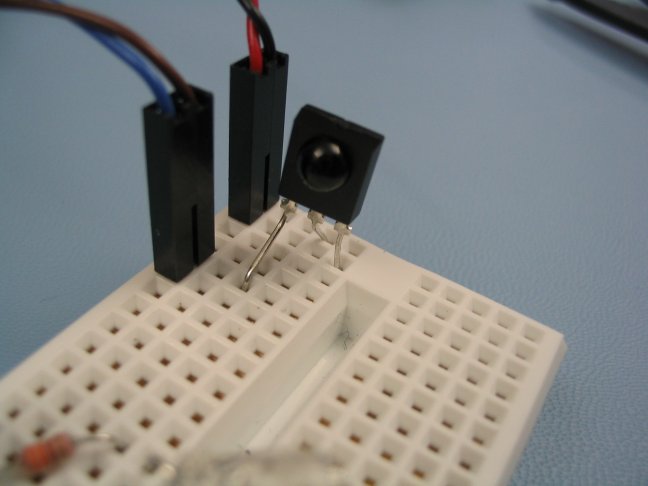
Le
photo-détecteur est un circuit complet en lui-même. La broche du
milieu est à la masse. La broche du bas doit être à +5 volts (si
la partie réceptrice bombée est vers la gauche). Le signal utile
correspond à la broche du haut (en contact avec le fil brun). Le
signal est au niveau haut si aucun signal à 38 kHz n'est détecté
en entrée. Il passe au niveau bas dans le cas contraire.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}