Assemblage
du robot
|
«In mass production, there
are no fitters»
|
|
|
- Henry Ford
|
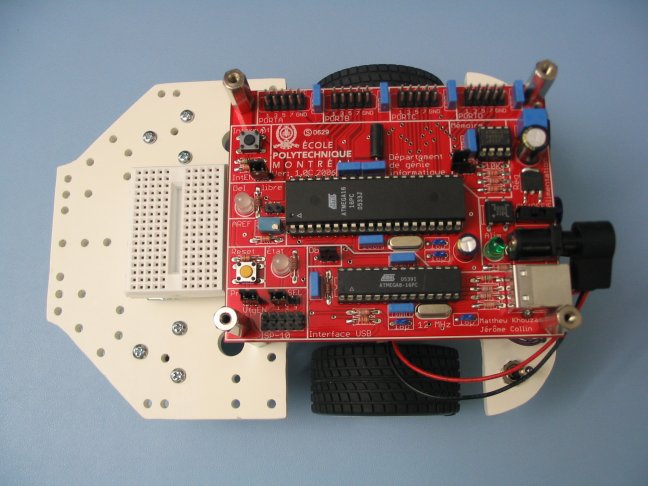
À ce
point-ci, tous les sous-composants principaux devraient avoir été
assemblés. Il reste à les intégrer avec le reste des pièces
mécaniques et du système de piles du robot.
Ces
pièces et sous-composants se fixeront, pour la majorité d'entre
eux, à la base de PVC mousse du robot. Cette base comporte plus
de 75 trous dont certains sont
très près les uns des autres. Pour éviter toute confusion, un
plan
des trous donne le rôle des plus importants pour le montage avec
un code de couleur. Avec les photographies qui suivent, il sera
facile de garder certains points de repère en tête. Les trous qui
ont la même couleur verte que le pourtour de la base sont réservés
pour l'installation de capteurs optionnels qu'il vaut mieux ignorer
pour l'instant. Il y a certains trous qui méritent une attention
particulière. D'abord, il faut bien repérer les quatre trous de
couleur rouge foncé donnant la position des tiges d'espacement
permettant de soutenir la carte mère, car il devient plus facile
d'identifier les autres trous à proximité par la suite. De plus,
il faut remarquer le trou de ¼ de pouce prévu pour un interrupteur
en haut à gauche, car il permet de déterminer si on voit bien le
dessus ou le dessous de la base, particulièrement sur les photos.
Il est en effet facile de penser que la base est symétrique, mais ce
n'est réellement pas le cas.
Tout
comme pour la soudure des composants électroniques, il y a avantage
à commencer par fixer les composants les moins hauts d'abord
d'autant plus qu'ils sont généralement moins fragiles. On
procédera donc comme suit:
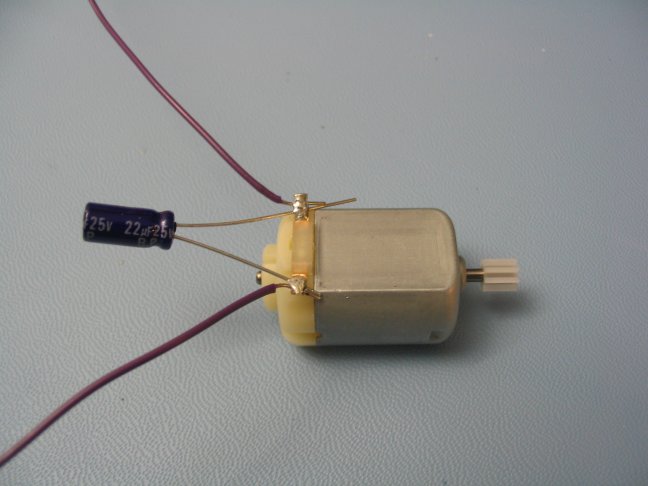
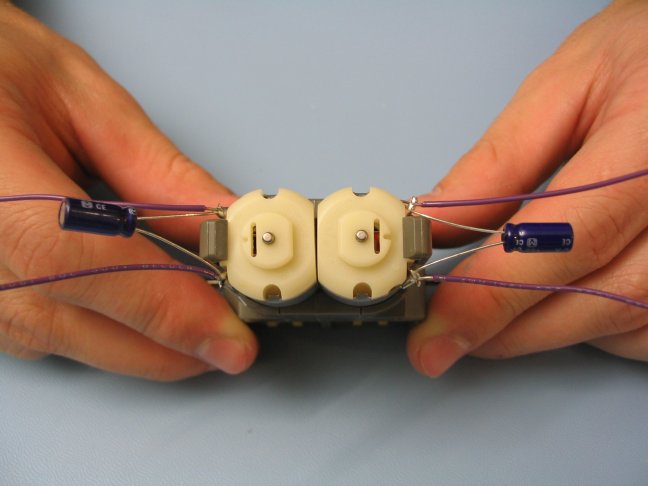
Les
instructions pour l'assemblage de la boîte d'engrenages s'étaient
terminées par une recommandation disant qu'il était préférable
d'attendre avant de monter les moteurs électriques. Il faut
maintenant prendre chacun de ces moteurs et souder un condensateur et
un bout de fil sur leur borne. Le condensateur est de 22 µF
(Digi-Key: P1177-ND) et n'est pas polarisé. Le fil doit avoir une
longueur de 7 à 10 centimètres, sera violet et, très important,
sera fait d'un seul brin de métal solide en son centre (et non de
plusieurs brins). Il faut dénuder chacune des extrémités des
bouts de fil d'environ 1 centimètre. Il faudra 4 bouts de fils, un
pour chacune des deux bornes de chacun des deux moteurs. Il faudra
par contre un seul condensateur par moteur. Chacune des bornes d'un
moteur a une forme en oeillet qui se verra donc traversée par un
bout de fil et d'une des deux broches d'un condensateur. Il est
préférable d'éloigner quelque peu le condensateur du moteur de
manière à pouvoir le replier vers la boîte d'engrenage, le long du
moteur, plus tard dans le montage. Cette position placera le
condensateur à l'abri des chocs qui pourraient éventuellement
survenir. Faire un point de soudure permettant de relier solidement
le fil, la broche du condensateur et l'oeillet, et ce, pour chacune
des quatre bornes. Insérer les moteurs dans la boîte d'engrenages,
les bornes vers l'extérieur.
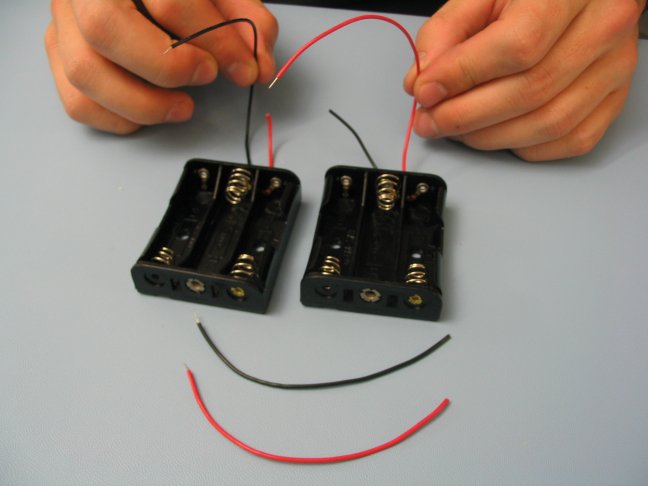
Prendre
les deux réceptacles pouvant recevoir 3 piles AA (Digi-Key:
2465K-ND). Couper le fil noir du premier de manière à ne laisser
qu'un bout d'environ 3 à 4 centimètres relié au réceptacle.
Faire de même pour le second réceptacle, mais pour le fil rouge
cette fois. Conserver les bouts rouge et noir qui ont été coupés.
Ils seront réutilisés plus tard. Dénuder les fils des
réceptacles sur environ 1.5 cm.
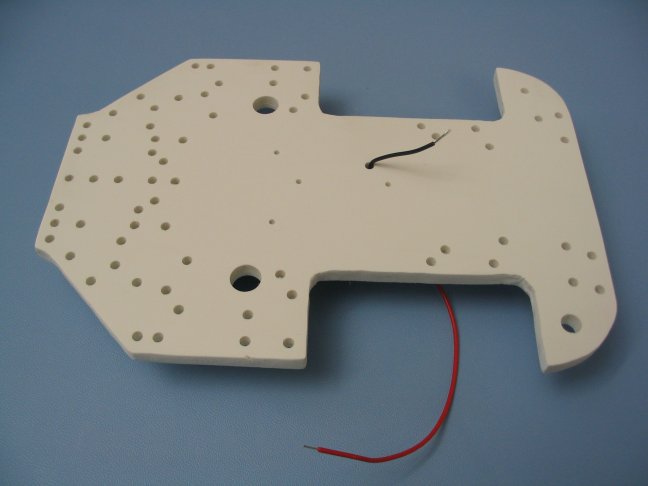
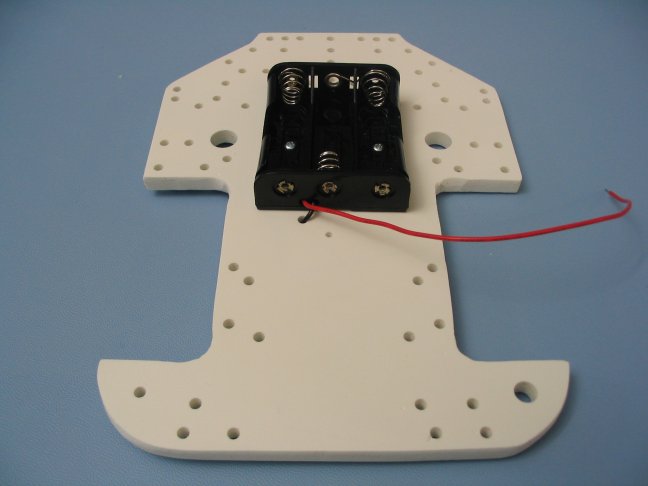
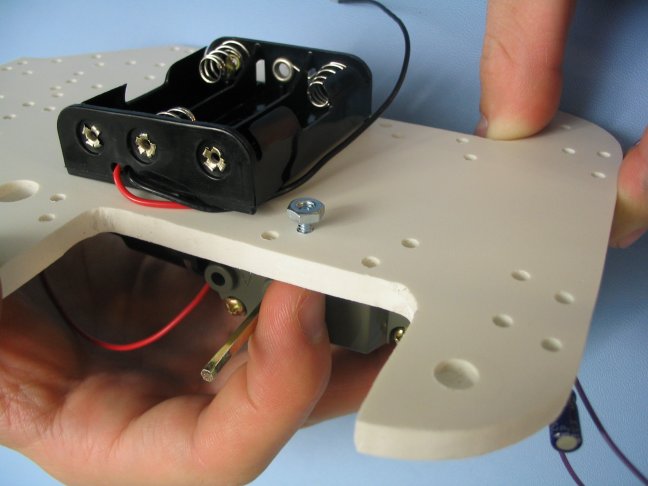
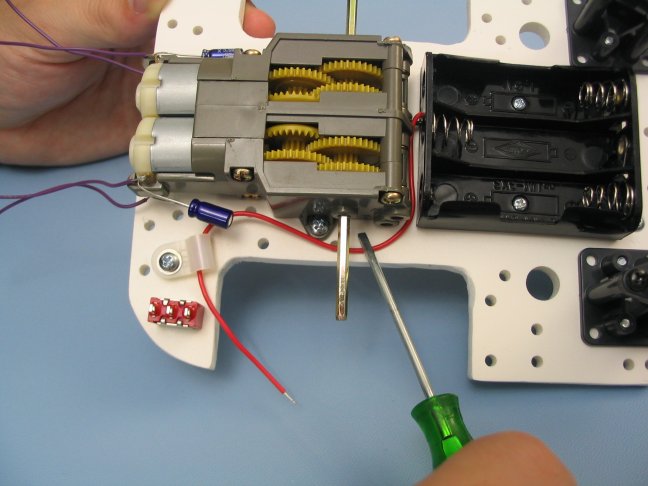
Sous la
base de PVC, viser le réceptacle ayant le fil noir et court. Il
vous faudra 2 petites
vis 2-56 de ¼
de pouce (Digi-Key:H700-ND).
Il faut absolument éviter de viser trop fermement, car les vis
passeront au travers du réceptacle tout simplement. De plus, on
remarquera que la vis entre directement dans la base en y faisant des
filets. Le PVC de la base est un matériau très tendre. Il
convient donc d'y aller avec douceur. Passer le fil noir à travers
le trou prévu à cette fin dans la base de manière à ce qu'il se
retrouve sur le dessus comme le montre la photographie.
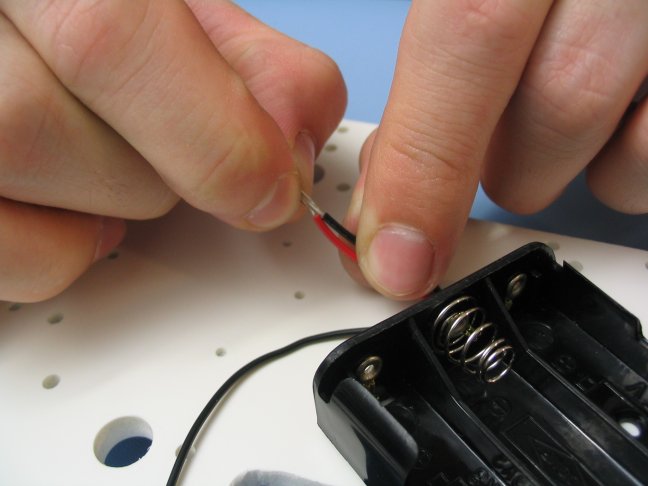
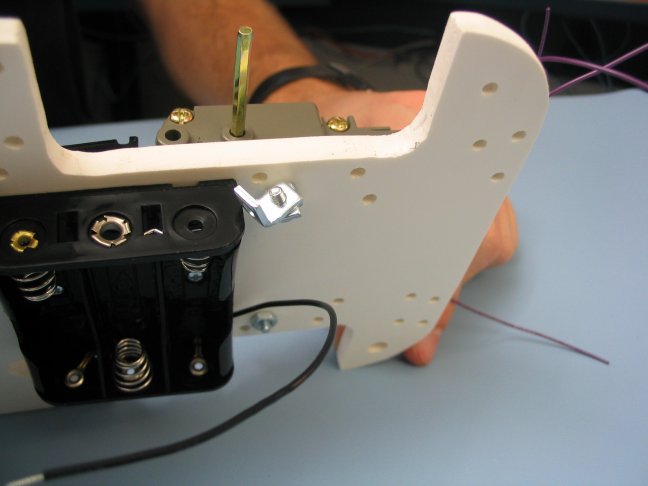
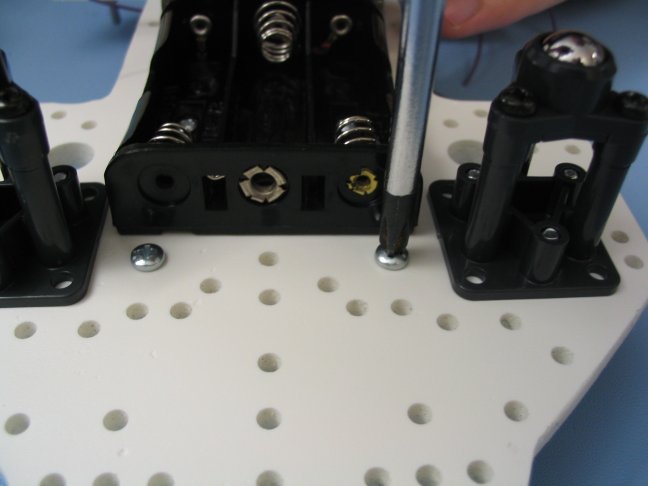
Prendre
le second réceptacle à piles AA, celui dont le fil rouge a été
coupé à l'étape précédente. Rapprocher l'extrémité du fil
rouge avec l'extrémité du fil noir du premier réceptacle qui doit
maintenant ressortir sur la face supérieure de la base. Torsader
les deux extrémités dénudées ensemble de manière à les rendre
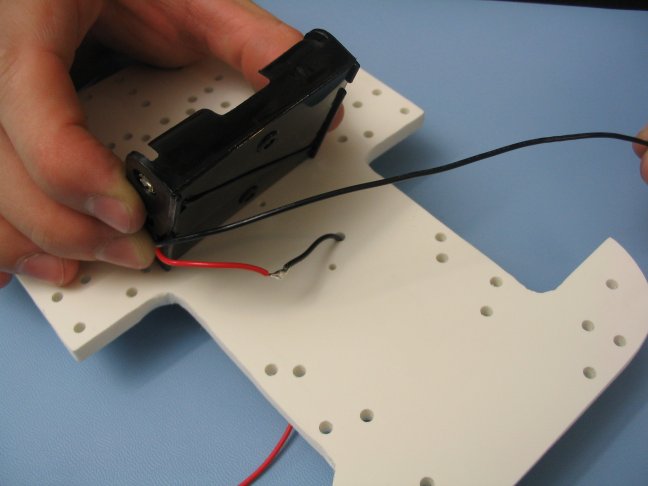
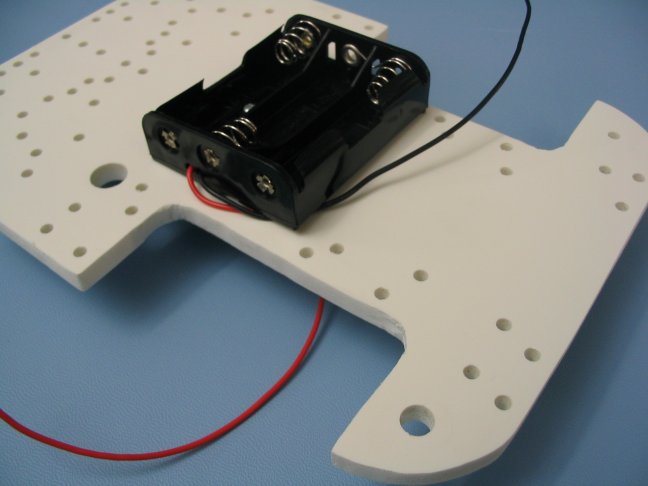
solidaires, puis souder l'ensemble. Rapprocher le réceptacle libre
près de la surface supérieure de la base. Cependant, s'assurer que
les deux fils précédemment soudés ainsi que le long fil noir sont
retenus sous le réceptacle (voir les photographies). Ainsi, les
fils soudés ne pourront pas entrer en contact avec quoi que ce soit
pour faire un court-circuit. De la même façon, le long fil noir
sera déjà orienté vers l'arrière où il alimentera éventuellement
les moteurs. Utiliser encore ici deux vis 4-40
de ¼ de pouce (Digi-Key: H703-ND
) pour fixer le réceptacle. Ne pas
viser trop fortement et se souvenir que le PVC est très tendre!
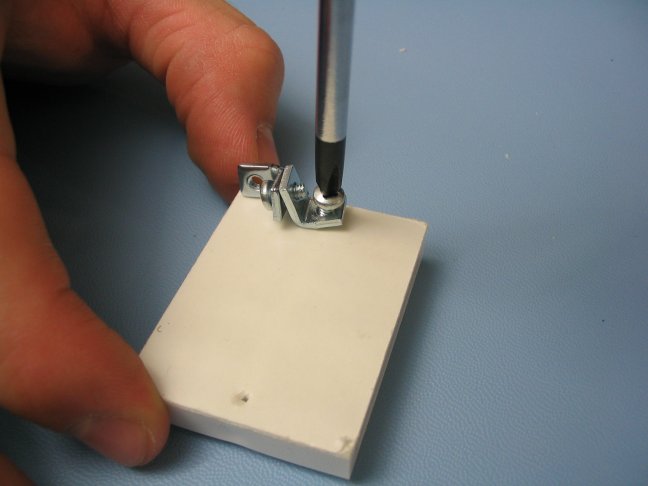
Il
convient maintenant de visser les moteurs-engrenages à la base de
PVC (moteurs vers l'arrière). Les trous sur la base sont situés à
juste un peu plus de 2 pouces du bord arrière (voir le plan de
trous). Il ne faut pas utiliser les vis fournies avec le moteur,
mais utiliser deux vis 4-40 de ½ pouce (Digi-Key: H705-ND). Du côté
gauche, la vis sera retenue par un écrou 4-40 (Digi-Key: H724-ND)
sur le dessus de la base. Du côté droit, la vis ne sera pas
retenue par un écrou. On prendra plutôt deux angles droits
métalliques ayant chacun 1 seul trou fileté (Digi-Key: 612K-ND)
(attention le modèle 621K-ND a deux trous filetés et sera utilisé
plus loin seulement!). On passera une vis 4-40 de ¼ de pouce
(Digi-Key: H703-ND)) dans le trou non fileté du premier des angles
puis dans le trou fileté du second. On vissera, mais sans trop de
fermeté pour l'instant. Le trou fileté du premier des angles
servira à retenir la vis qui fixe le moteur sous la base du robot
comme le montrent les photographies. Éviter que des fils se
retrouvent entre les moteurs-engrenages et la base de PVC.

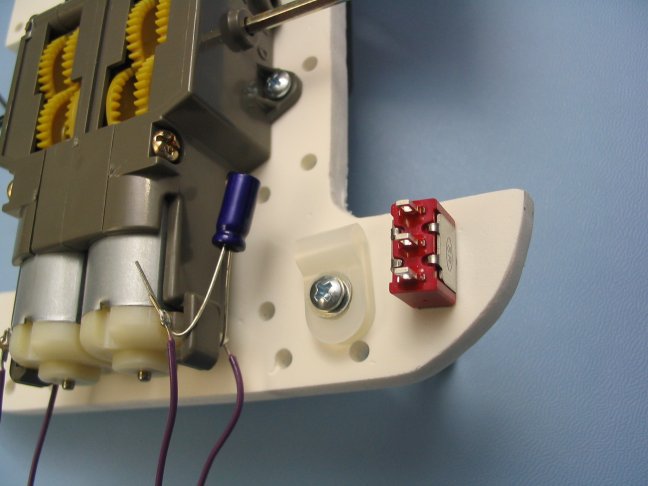
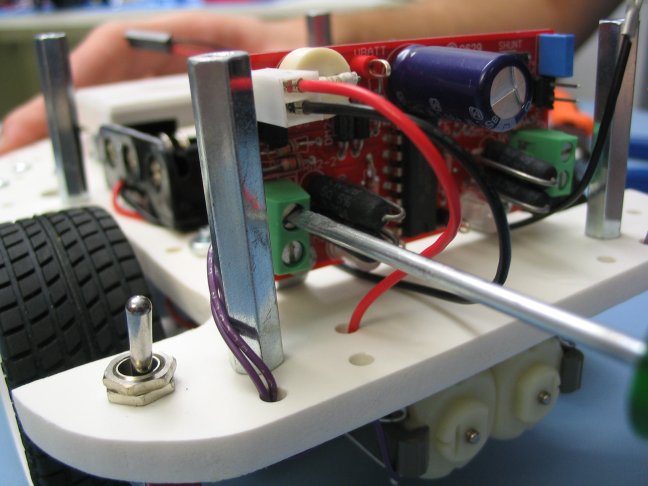
Les
piles AA alimenteront les moteurs via le pont en H. Cependant, un
interrupteur permettra de couper le contact de cet ensemble au
besoin. Cet interrupteur est de type «à bascule» (toggle
switch en anglais) et est de couleur rouge (Digi-Key:
432-1144-ND). Il faut le monter du côté gauche, à l'arrière dans
le trou de ¼ de pouce. La rondelle (washer en anglais) qui
vient avec l'interrupteur est inutile ici. Revisser fermement les
deux bagues après avoir passé l'interrupteur au travers de la base.
La tige de l'interrupteur doit ressortir sur le dessus de la base.
Monter
les roulettes pivotantes de type boule avec leur support à l'avant
du robot. Trois trous formant un triangle sont prévus de chaque
côté. Il faut utiliser des vis 4-40 de 5/8ème de pouce de long
(Digi-Key: H706-ND) (et non les vis fournies par Tamiya). Chaque vis
passera d'abord dans la plaque de PVC pour poursuivre sa course
directement dans un des supports. Trois trous du support sont prévus
pour retenir fermement la vis sans recours à un écrou, le filetage
se faisant avec l'insertion. Le plastique des supports est très peu
souple. Il faut donc viser avec fermeté.

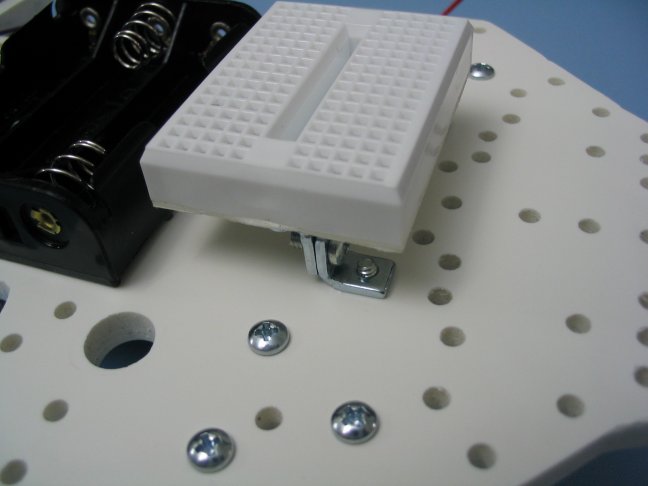
Une
petite plaquette blanche de prototypage (breadboad) avec un
ruban adhésif à l'arrière doit être installée à l'avant du
robot (Cixi Wanjie Electronic - BB-601T). Plusieurs types de
capteurs pourront y être enfichés au besoin plus tard. Pour la
fixer, il faut 4 vis 4-40 de ¼ de pouce (Digi-Key: H703-ND) et 2 de
3/8ème de pouce (Digi-Key: H782-ND). Il faut également 4 angles
métalliques ayant un seul trou fileté 4-40 (Digi-Key: 612K-ND).
Passer une vis de ¼ de pouce dans les trous non filetés de chacun
des angles, rejoindre le trou fileté des deux autres angles et y
insérer la vis de 1/4 assez fermement. Les deux autres vis de ¼
qui n'ont pas encore été vissées servent à retenir le breadboard.
Sur les côtés de celui-ci, on remarque deux trous, à mi-hauteur.
Ces trous peuvent recevoir des vis 4-40 et le retenir avec fermeté.
En plaçant l'angle métallique (sans enlever le ruban adhésif) et
en visant, la plaque devrait éventuellement être retenue par
l'angle métallique. Le chemin à faire à travers le trou de la
plaque en plastique peut demander de viser avec fermeté et d'avoir
un peu de patience, mais on y parvient généralement sans trop de
problèmes. Le breadboard avec ses angles métalliques peut
maintenant être fixé à la base du robot avec les deux vis de
3/8ème de pouce. On peut les insérer par le dessous de la base et
à travers deux trous espacés de 1.5 pouce à l'avant du robot.
Elles sortent alors sur le dessus de la base où les angles
métalliques et leurs trous filetés peuvent les retenir fermement
sans l'aide d'écrous.

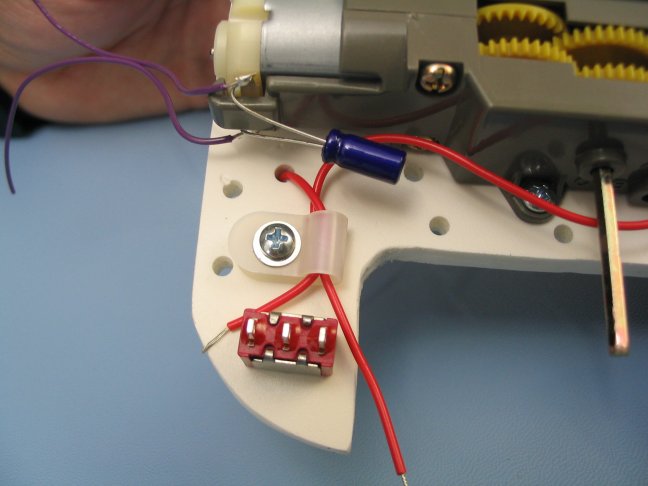
Prendre
une tige d'espacement de 1.5 pouce (Digi-Key: 1831K-ND), une vis 4-40
de ½ pouce (Digi-Key: H705-ND), une sangle blanche en nylon
(Digi-Key: 7620K-ND) et une rondelle (washer) 4-40 en métal
(Digi-Key: H734-ND). Enfiler avec la vis successivement la rondelle
et la sangle en nylon. Passer cette vis à travers la base de PVC
dans le trou qui est près de l'interrupteur et qui est conçu pour
fixer une tige d'espacement qui, elle-même, retiendra un coin de la
carte mère plus tard (voir le plan de trous). La vis est évidemment
retenue du côté supérieur de la base par la tige, mais on évitera
de trop serrer l'ensemble pour l'instant, car des fils devront
d'abord passer aisément par la sangle en nylon pour les regrouper et
les maintenir en place.

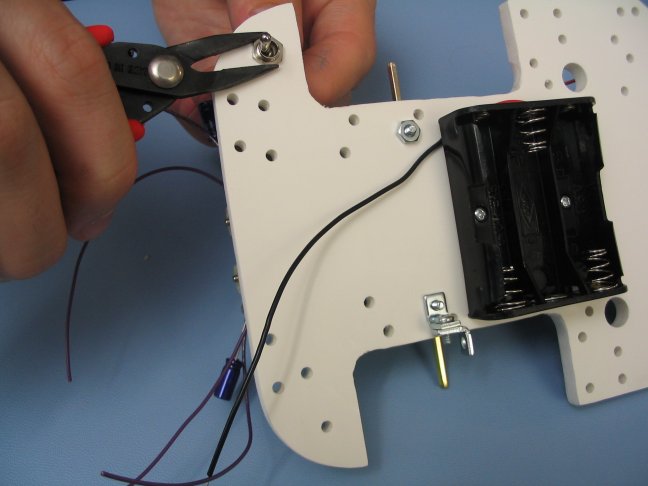
Tout est
maintenant en place pour router les fils. Le long fil rouge du
réceptacle à piles AA du dessous doit rejoindre l'interrupteur à
l'arrière, mais en passant par la sangle en nylon d'abord. Ainsi, il
ne nuira pas aux roues motrices. Il doit être coupé à la longueur
appropriée, dénudée d'un centimètre environ et soudé à la borne
arrière de l'interrupteur. Lorsqu'un bout de fil rouge d'un des
réceptacles à piles AA a été coupé précédemment, il a été
mentionné de le conserver. C'est ici qu'il sera utile. Il faudra
dénuder ses deux bouts et souder un de ceux-ci à la borne du milieu
de l'interrupteur. Par la suite, il faudra le passer par la sangle
en nylon et à travers la base de PVC par le trou le plus près des
moteurs parmi ceux qui se trouvent dans le voisinage.
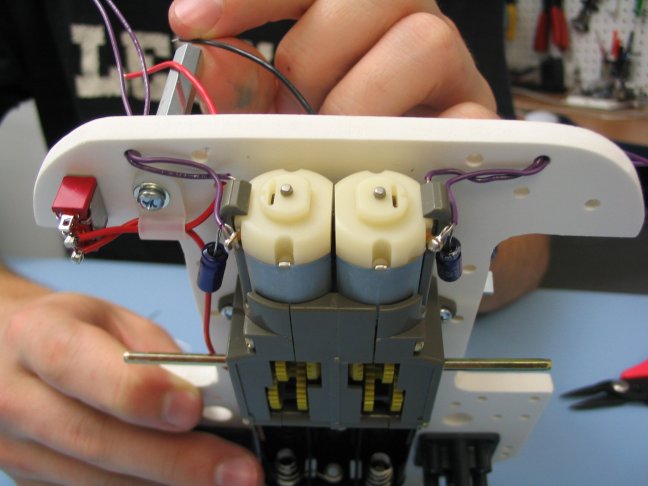
Les fils
violets soudés aux bornes des moteurs précédemment doivent
maintenant remonter vers le dessus de la base. Cependant, il
convient de les faire passer par les deux trous les plus à
l'extérieur parmi les quatre alignés complètement à l'arrière de
la base. Replier les fils le plus possible de façon à ce qu'ils ne
nuisent pas. C'est aussi un bon moment pour repousser les
condensateurs le long des moteurs si ce n'est pas encore fait. Il
faut aussi resserrer la vis qui retient la sangle blanche en nylon.
Si on regarde l'arrière du robot, on remarque donc que les fils
d'alimentation rouge et noir se rejoignent finalement et que les fils
violets allant aux moteurs sont bien sur le dessus.
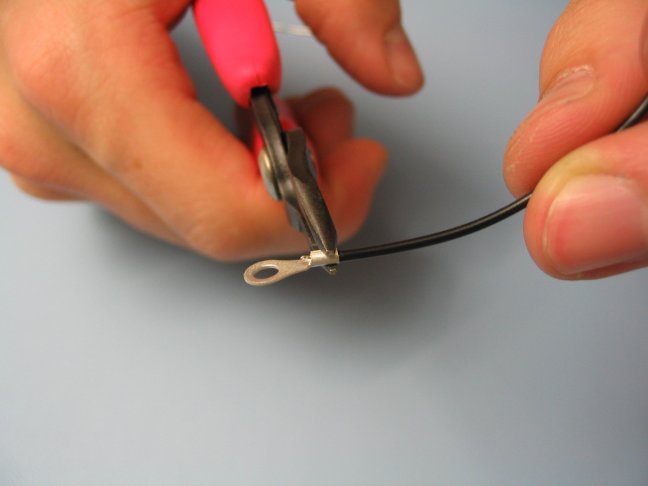
Le bout
de fil noir coupé plus tôt d'un des réceptacles à piles AA
servira ici. Il faut réduire sa longueur à environ 5 ou 6 cm et
dénuder ses extrémités d'à peu près ½ cm. Avec des pinces
ordinaires, sertir un petit terminal en œillet métallique de
grosseur #4 (Digi-Key: A27148-ND) à chacune des extrémités. Le
câble ainsi obtenu permettra de relier les masses (grounds)
du circuit du pont en et de la carte mère.

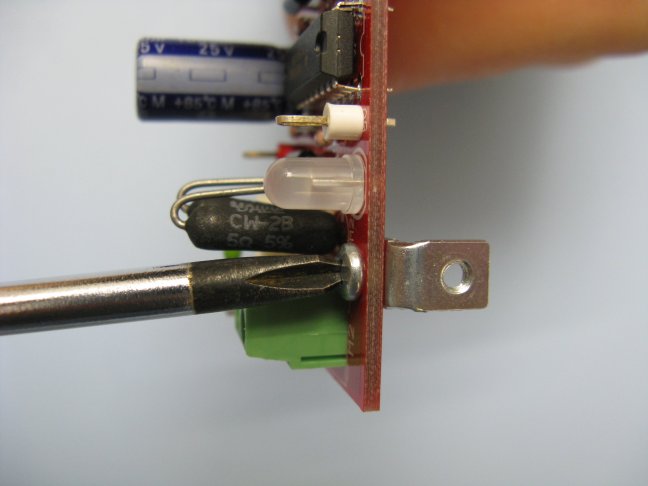
Jusqu'ici,
les petits angles droits en métal utilisés avaient un seul trou
fileté. Pour cette étape, il faut utiliser ceux avec deux trous
filetés (Digi-Key: 621K-ND). Les placer à l'arrière des trous de
montage du circuit du pont en H situé au bas. Prendre deux vis 4-40
de ¼ de pouce de longueur (Digi-Key: H700-ND) et les passer à
travers le circuit imprimé de manière à rejoindre les supports
métalliques. Les trous de ces derniers étant filetés, aucun
recourt à un écrou n'est nécessaire. Avant de passer la vis dans
le trou de montage de droite, c'est-à-dire celui du côté du point
de test noir relié à la masse, il y a une étape supplémentaire.
Il faut enfiler la vis à travers un des deux œillets métalliques
du câble serti à l'étape précédente. Laisser l'autre bout du
câble libre pour l'instant. Il est à noter que les trous de la
carte mère, de même que ceux du circuit du pont en H sont à la
masse (ground). Les tiges et les vis qui les traversent sont
donc automatiquement à la masse. Cette observation vous sera utile
lorsque viendra le moment de brancher des appareils de mesure de
laboratoire (voltmètre, oscilloscope, etc...) puisqu'il vous sera
toujours facile de trouver le commun électrique!
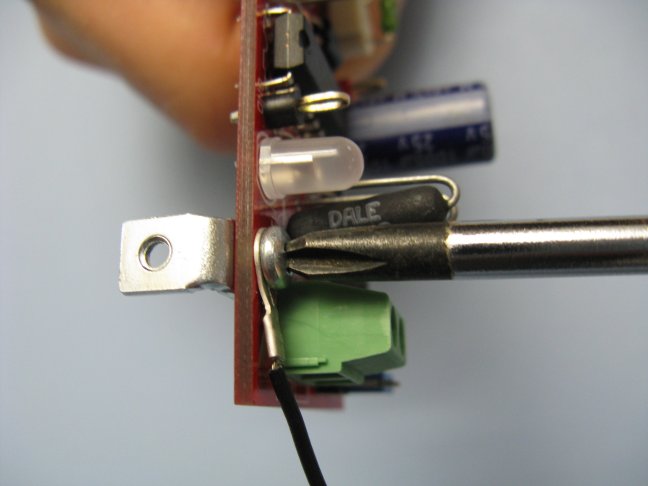
Placer
le circuit du pont en H sur le dessus de la base du robot. Des trous
situés environ 2 centimètres derrière ceux utilisés pour retenir
les moteurs permettent le passage d'une vis 4-40 de 3/8ème de pouce
de longueur (Digi-Key: H782-ND). Les petits angles métalliques
fixés au circuit du pont en H à l'étape précédente agiront une
fois de plus comme écrous pour solidifier l'ensemble.
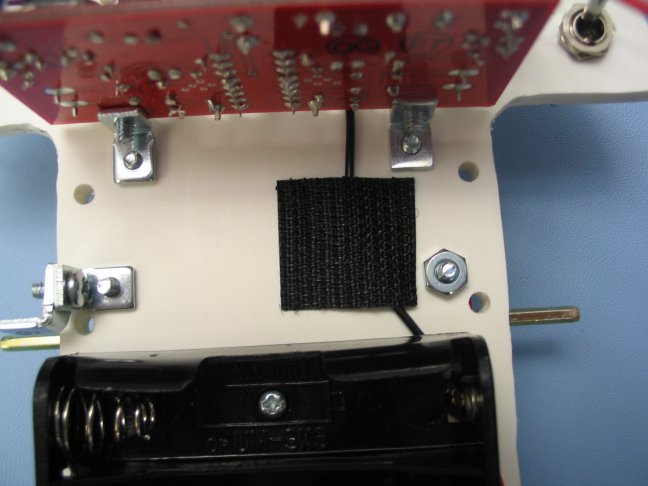
Une pile
de 9 volts alimentera la carte mère. Elle sera retenue très
simplement par un morceau de velcro (noir ou blanc). Placer le côté
crochet de ce bout de velcro entre le réceptacle à piles AA du
dessus et le pont en H, du côté gauche du robot. En même temps,
il est pratique de pouvoir passer le fil noir provenant du réceptacle
pour piles AA sous la bande de velcro pour le fixer à la base. Le
fil noir pourra aussi continuer son chemin en passant entre les deux
angles métalliques qui retiennent le pont en H pour se retrouver
complètement à l'arrière.
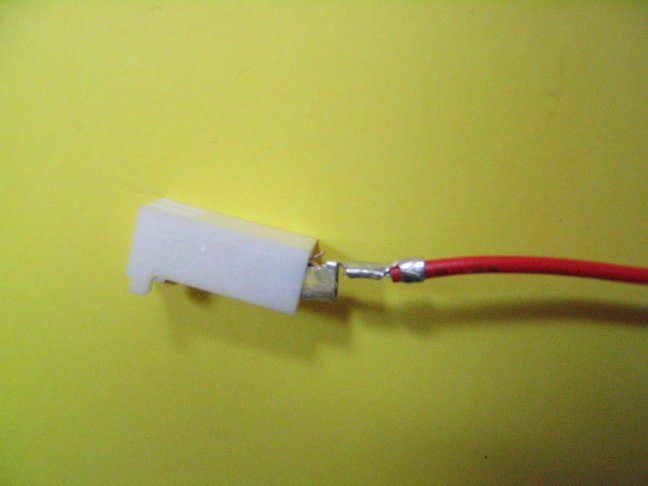
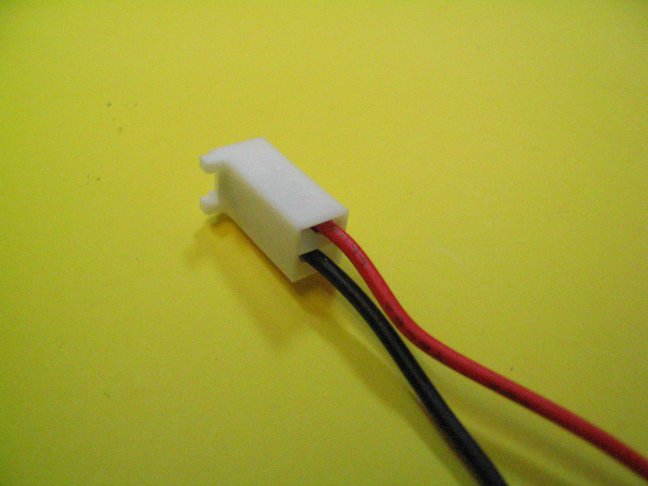
Un
piézoélectrique est un composant simple qui permet d'émettre des
sons (Digi-Key: 102-1144-ND). Deux fils en sortent. Il faut placer
un connecteur Molex (Digi-Key: WM2800-ND) au bout des fils dénudés
pour pouvoir le connecter sur un connecteur IDC éventuellement. Il
suffit donc de sertir une pièce de métal femelle sur chacun des
fils et l'insérer dans le connecteur noir. Le connecteur Molex
n'est pas polarisé ce qui fait qu'on peut insérer les fils dans
l'un ou l'autre des conduits. Tout comme le connecteur TE, il faut
cependant s'assurer que le morceau de métal (Digi-Key: WM2510-ND)
soit introduit de manière à ce que le petit crochet miniature
puisse s'agripper dans le fond du conduit en ressortant par la petite
ouverture sur l'une des faces du connecteur. Vous aurez besoin d'une
pince à sertir spéciale comme celle utilisée pour sertir les
câbles (demander au responsable de laboratoire).


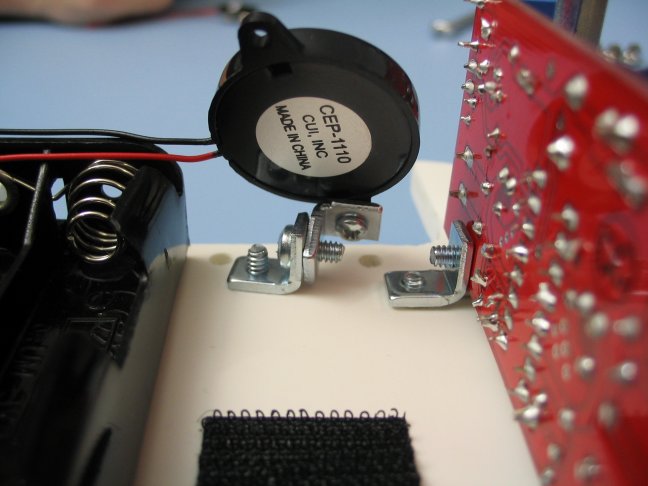
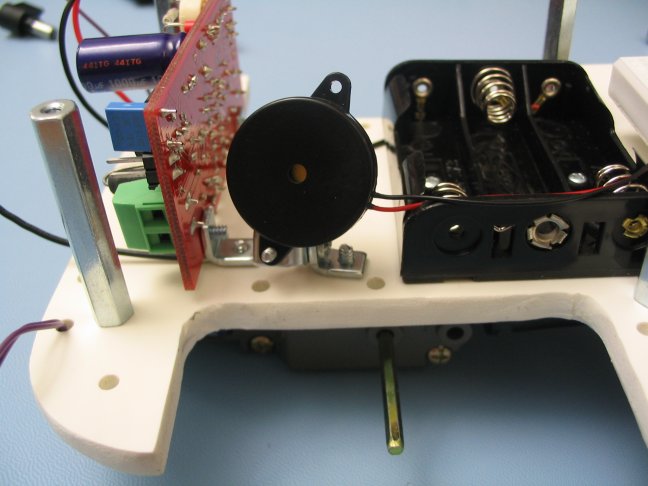
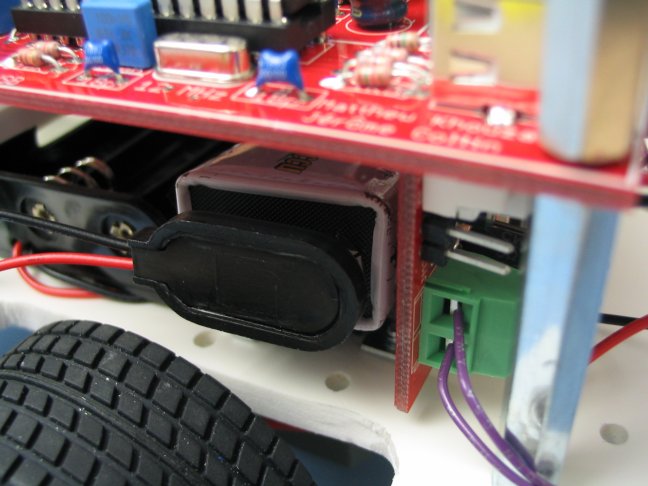
Le
modèle de piézoélectrique utilisé ici est petit et fragile. Par
contre, il sera protégé parce qu'il trouve place sur le robot à un
endroit où il est entouré de plusieurs autres composantes. En
contrepartie, cette position le rend quelque peu difficile à placer
lors du montage. Il sera retenu uniquement par une vis 2-56 de ¼ de
pouce (Digi-Key: H700-ND). Il est probablement nécessaire d'entrer
la vis dans un des deux trous de montage du piézoélectrique, dans
le but de faire des filets dans le plastique dans un premier temps.
On peut choisir l'un ou l'autre des trous de montage du piézo, mais
il est préférable de s'organiser pour que les fils qui sortent du
piézo se dirigent vers l'avant du robot. On veillera aussi à ce
que le son puisse sortir vers l'extérieur en repérant l'ouverture
sur l'une des faces du piézo. Retirer la vis par la suite en
sachant maintenant qu'elle pourra entrer de nouveau sans difficulté
dans le trou de montage. Passer la vis dans le trou non fileté de
l'angle métallique qui se trouve du côté droit du robot entre le
réceptacle à pile AA et le pont en H. Il suffit maintenant de
visser dans le trou de montage du piézo fileté précédemment. Ne
pas serrer trop fort, car le plastique autour du trou est très
mince. Il est à noter qu'il faudra probablement réajuster les vis
qui retiennent les angles métalliques entre eux et à la base pour
donner une bonne orientation et une solidité à l'ensemble.
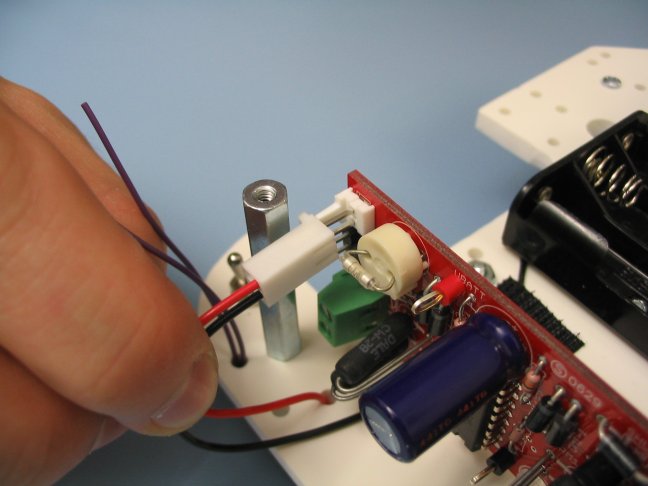
Lors de
la soudure du point en H, la partie mâle d'un connecteur blanc TE a
été insérée dans le coin supérieur gauche. Il faut aussi se
souvenir que cette partie mâle avait une petite tige sur le côté
extérieur pour restreindre le sens de l'insertion. Il faut
maintenant permettre aux fils rouge et noir provenant des réceptacles
à piles AA de rejoindre cette partie mâle pour faire un contact.
Il est évident qu'on utilisera la partie femelle du connecteur TE
pour y arriver (Digi-KeyK: A19490-ND). Pour ce faire, on utilisera
également de petites pièces de métal à glisser à l'intérieur du
connecteur femelle (Digi-Key: A19520-ND). Sertir délicatement les
petites pièces de métal avec des pinces appropriées (qu'il faut
obtenir du chargé de laboratoire). Une fois sertie, la partie
dénudée devrait être retenue par le repli métallique interne. Le
repli métallique externe devrait retenir le début de la partie non
dénudée du fil. Ici, la polarité est importante si vous ne voulez
pas faire sauter votre fusible sur le pont en H! Il faut que le
fil noir se retrouve au bas du pont H et le rouge au-dessus
lorsque le connecteur est enfiché sur le pont en H. Assurez-vous de
l'orientation en regardant comment les parties mâle et femelle se
jumellent en présence de la tige qui donne une polarité au
connecteur. Faire glisser les pièces de métal dans les conduits du
connecteur femelle de telle sorte que le petit crochet de la pièce
métallique s'agrippe aux ouvertures sur le dessus du connecteur.
Normalement, lorsque les pièces métalliques ont été poussées
jusqu'au fond du connecteur, on peut les voir par ces ouvertures et
vérifier si le crochet est bien retenu à l'intérieur. Les fils
devraient maintenant être bien retenus au connecteur femelle.
Enficher le connecteur femelle dans la partie mâle du pont en H.
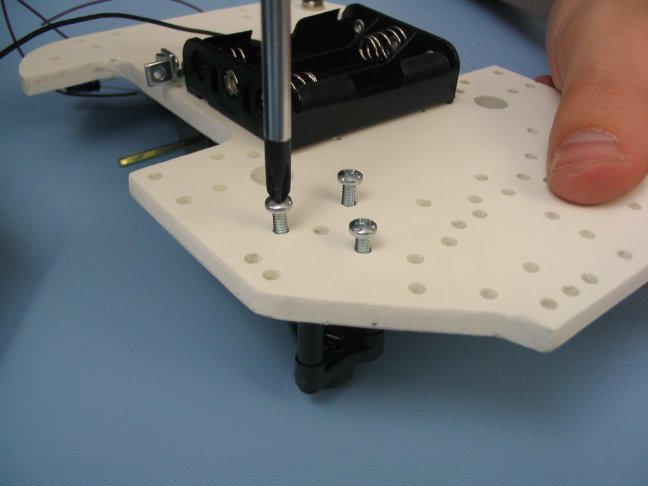
Monter
les roues motrices blanches sur les essieux sortants des boîtes
d'engrenages. Ne pas trop enfoncé les roues inutilement. Centrer
plutôt la roue par rapport à l'encoche dans la base de PVC qui est
prévue pour lui laisser de l'espace. Éviter à tout prix que les
roues frottent sur la base de PVC, les fils ou le piézo.


Lorsque
la sangle en nylon a été placée tout près de l'interrupteur, une
tige d'espacement de 1.5 pouce a été montée de l'autre côté de
la base de PVC pour solidifier l'ensemble. Il reste encore 3 autres
de ces tiges à monter (Digi-Key: 1831K-ND). Bien repérer sur le
plan de trous les points de passage que devront emprunter 3 vis 4-40
de 3/8ème de pouce de longueur (Digi-Key: H782-ND). Viser les tiges
en utilisant un tournevis et une clef appropriés.
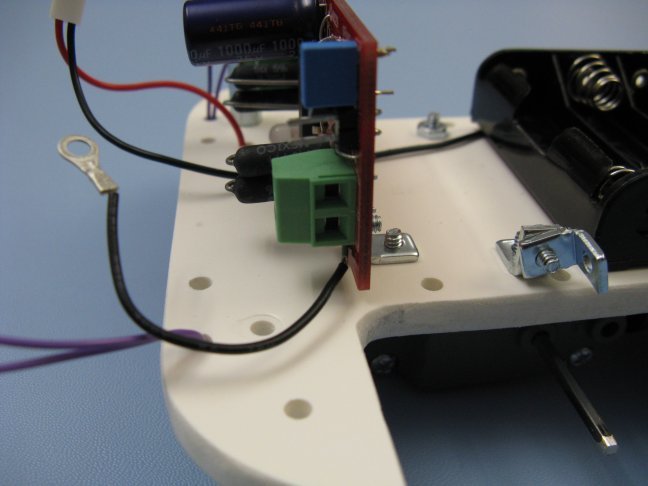
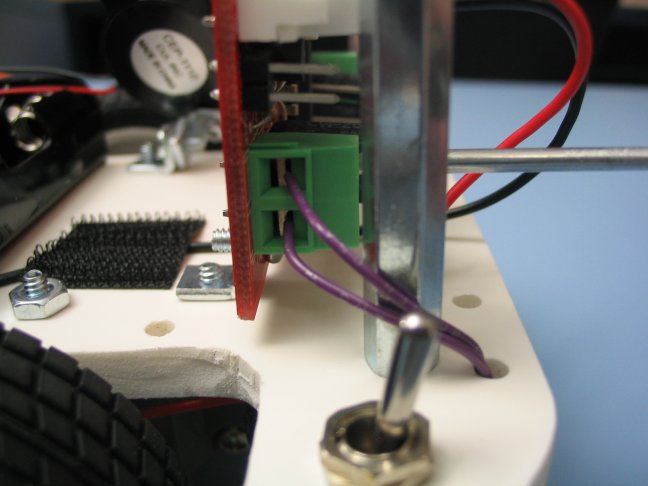
Les fils
provenant des moteurs ne sont pas encore reliés au pont en H. Ils
ressortent sur le dessus de la base tout près des tiges arrière qui
soutiendront la carte. En contournant ces tiges, il suffit de les
rapprocher des gros connecteurs 5 mm à 2 positions verts. Il se
peut que les fils soient un peu trop longs. Il suffira de les
raccourcir. De plus, il est important de les dénuder sur au moins
un centimètre. Insérer les fils dans les ouvertures extérieures
et visser les vis sur le dessus des connecteurs. Voir à ce que la
partie métallique des fils est celle qui est en contact avec le
connecteur et non la gaine de plastique pour assurer une bonne
conduction. Il est peu important de déterminer quel fil doit aller
dans l'une ou l'autre des ouvertures. Plus tard, lorsque le robot
reculera plutôt que d'avancer, il vous suffira d'inverser ces fils
dans le connecteur pour corriger la situation. Il vous sera même
possible de corriger ce problème de façon purement logicielle si
vous le souhaitez.
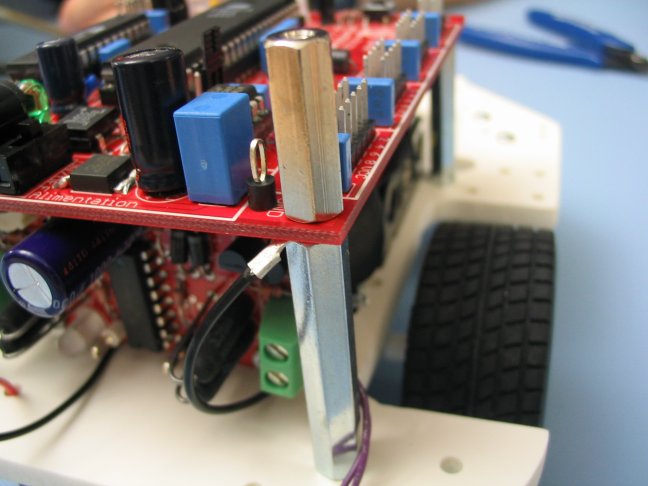
Placer
la carte mère sur les tiges d'espacement précédemment montées sur
la base du robot. Le haut de la carte devra se retrouver du côté
droit du robot. Utiliser quatre tiges métalliques de ¾ de pouce de
longueur avec un bout mâle (Digi-Key: 1946K-ND), une pour chaque
coin de la carte. Ces tiges, en raison de leur hauteur, offrent une
protection supplémentaire aux composantes électroniques, surtout
les condensateurs électrolytiques. Ainsi, lorsque le robot sera
rangé dans sa boîte, le couvercle n'écrasera pas le dessus de la
carte. Au coin arrière droit, il faut en plus insérer l’œillet
du bout de fil noir laissé libre jusqu'à maintenant. L'autre bout
de ce fil est retenu entre un angle métallique qui soutient le pont
en H et la base de PVC. L’œillet métallique libre doit s'insérer
entre la tige de 1.5 pouce de longueur et le dessous de la carte
mère. Le pont en H et la carte mère auront aussi une masse
électrique commune.
Placer
les 6 piles AA dans les réceptacles en suivant la polarité indiquée
dans le fond des supports tel qu'on l'observe pour les objets les
plus courants fonctionnant à piles. Attention, cette étape peut
mettre le robot sous tension suivant la position de l'interrupteur.
Prenez garde au fait que des courts-circuits peuvent survenir si vous
avez effectué de mauvais branchements. Utilisez votre nez pour
détecter ce qui pourrait sentir le brûlé! Assurez-vous aussi que
le pont en H ne chauffe pas de façon importante ce qui peut aussi
indiquer un court-circuit. Dans le doute, avant de placer la
dernière pile, montrez votre robot au chargé de laboratoire pour
une inspection rapide.
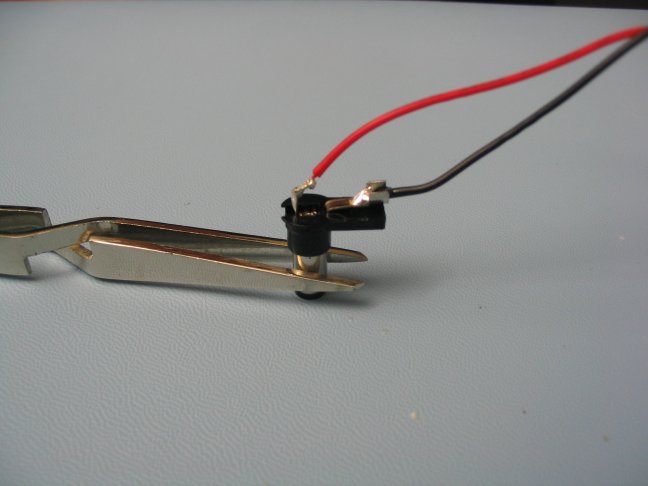
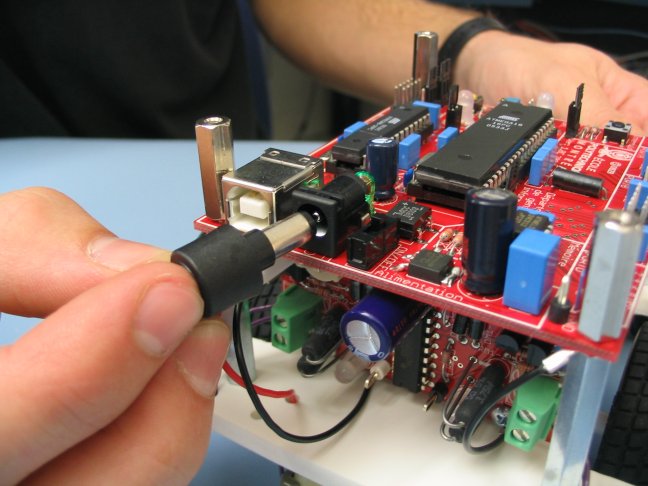
La carte
mère est alimentée par une pile 9 volts. Un clip conçu
spécifiquement pour se brancher aux bornes de ce type de pile est
présent dans votre ensemble et il vient avec ses fils noirs et
rouges (Digi-Key: 2238K-ND). Il suffit donc de relier ces fils à un
connecteur 2.1 mm pour que la pile puisse alimenter la carte
directement avec l'interface appropriée. Il est en vente uniquement
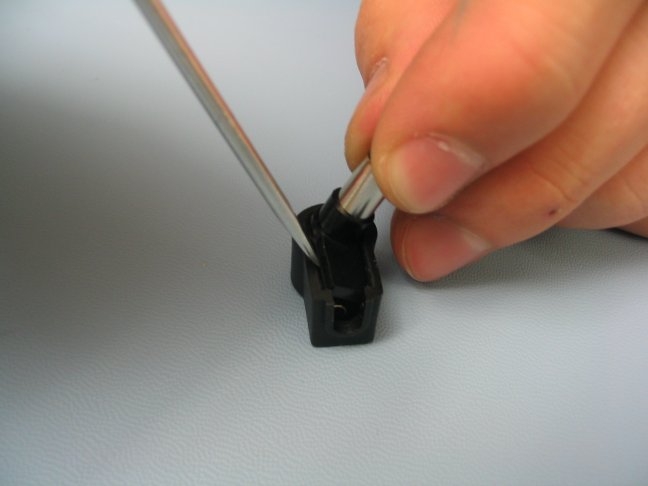
chez mouser.com sous le numéro 171-3213-EX). Le connecteur 2.1 mm
doit être ouvert. Un petit tournevis peut aider pour cette
opération. L'intérieur du connecteur a deux bornes auxquelles les
fils du clip peuvent être soudés. Comme la carte mère a un
redresseur de tension intégré, les fils peuvent être branchés sur
l'une ou l'autre des bornes sans avoir à porter attention à la
polarité. Une fois les deux points de soudure terminés, refermer
le connecteur 2.1 mm.
Comme
mentionner précédemment, la pile 9 volts est retenue par un velcro
dont le côté «crochets» a déjà été placé sur la base de PVC.
Il suffit donc maintenant de placer la partie «velours» sur un
côté large et vers le haut de la pile. On enfichera également le
clip d'alimentation sur le dessus de la pile. L'espace occupé par
cette dernière est réduit parce qu'entouré de plusieurs autres
composantes du robot. Cet aspect est positif puisque le mouvement de
la pile s'en trouvera limité. Insérer le connecteur 2.1mm de
l'autre bout du fil dans son complément sur la carte mère. Le
routage du fil entre la pile et la carte a très peu d'importance.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}