Montage
de capteurs sur le robot
Lors du
montage du robot, il était inutile de décrire la position de tous
les trous de la base de PVC du robot. Seulement les trous utiles au
montage ont été présentés. Pour positionner les capteurs sur le
robot, il est maintenant temps d'identifier ceux à l'avant de la
base. Un nouveau
plan
des trous (en format PNG)
montre ceux qui nous seront utiles. On peut voir que certains sont
regroupés afin de supporter un capteur ou une catégorie de capteurs
particuliers.
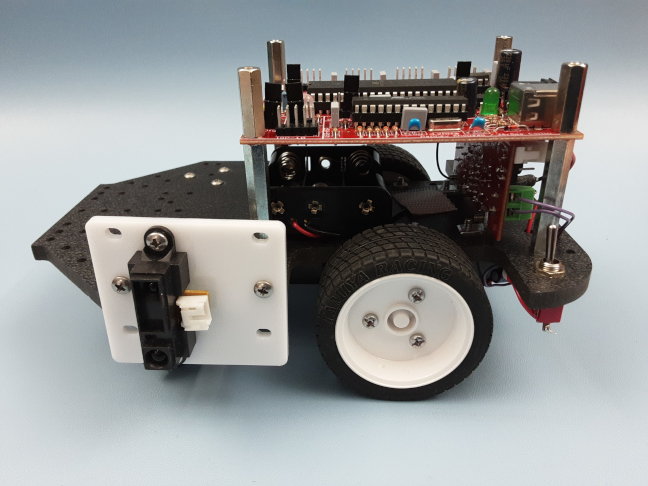
Support
universel de suiveur de ligne
L’espacement
entre les trous de montage des suiveurs de lignes disponibles
commercialement varie sensiblement. De plus, on veut généralement
conserver le contrôle de l’ajustement de la hauteur du suiveur de
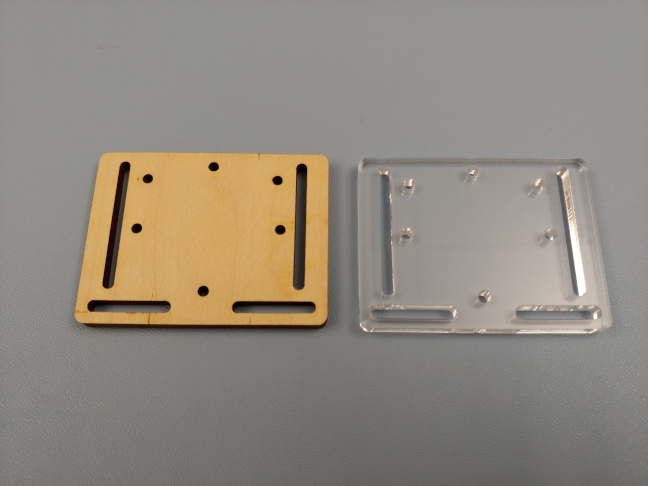
ligne. Un support permettant ces deux types d’ajustement a été
conçu et produit en utilisant la découpeuse
au laser de Polyfab (Speedy 400). Les fichiers de conception aux
formats SVG
et PDF
peuvent être réutilisés au besoin. Le bois ou l’acrylique sont
des matériaux de choix pour obtenir le résultat final:
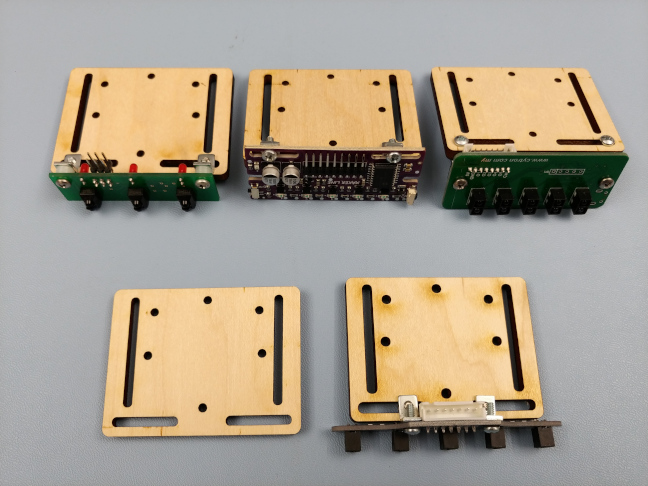
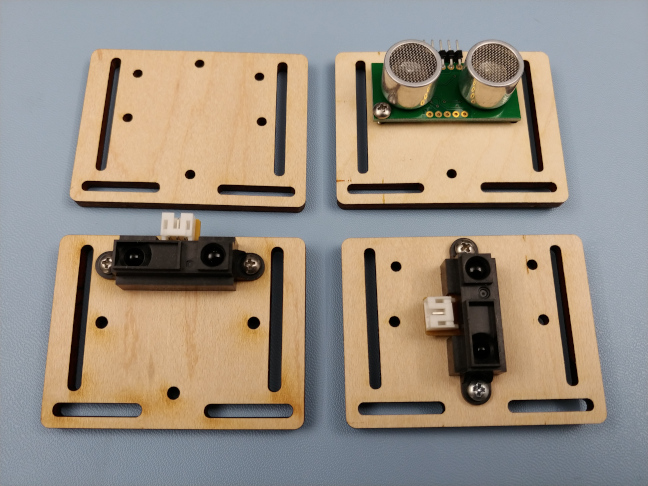
Le
support peut prendre en charge des modèles variés de suiveurs de
lignes. À noter que des vis de type 4-40 de 1/4, 5/16e,
3/8e ou 1/2 pouce sont souvent utilisées pour
l'assemblage en combinaison avec des angles métalliques avec deux
trous filetés. On peut aussi avoir à placer des espaceurs ou bagues
pour éviter des connecteurs ou des pièces électroniques du suiveur
de ligne.
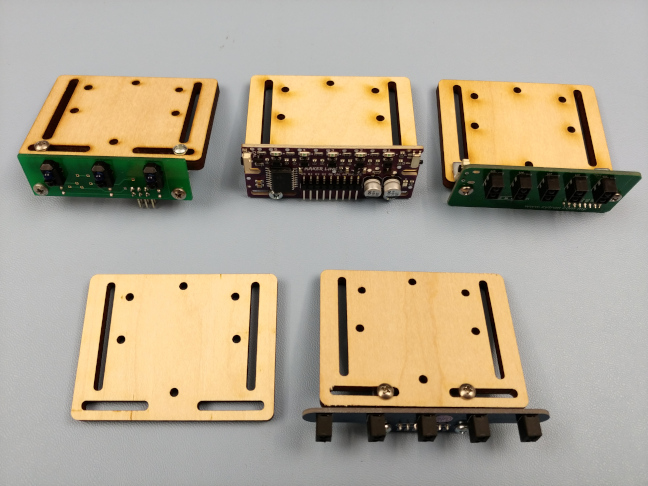
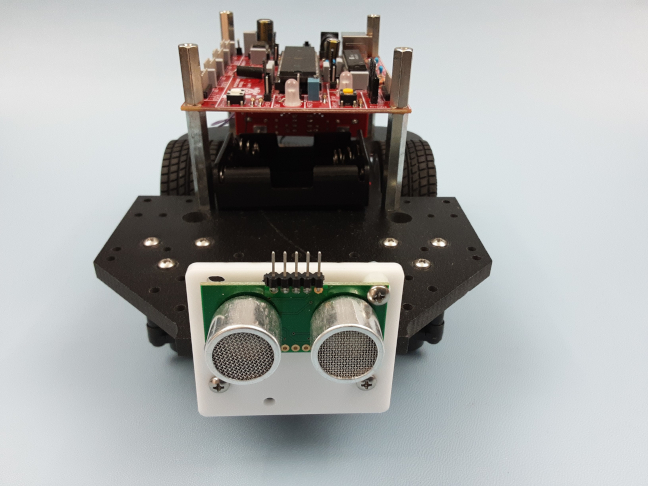
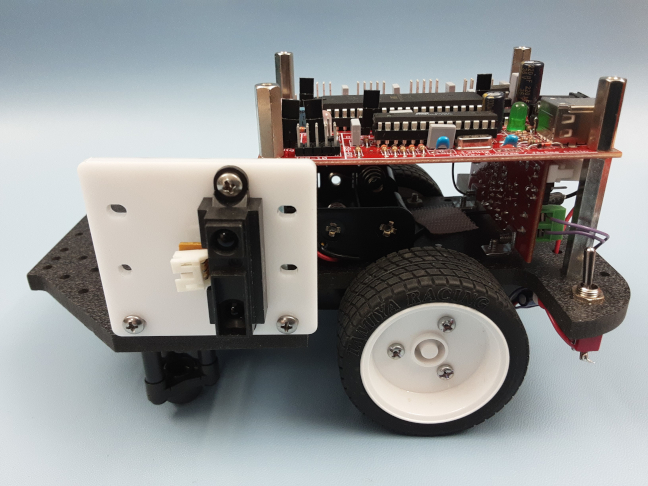
Cependant,
comme le support est une plaque avec passablement d’espace libre en
son centre, on peut aussi y placer un sonar Devantech ou un détecteur
infrarouge de Sharp en plus du suiveur de ligne si la situation le
demande. On a donc un seul support pour potentiellement deux
capteurs indépendants et de types différents.
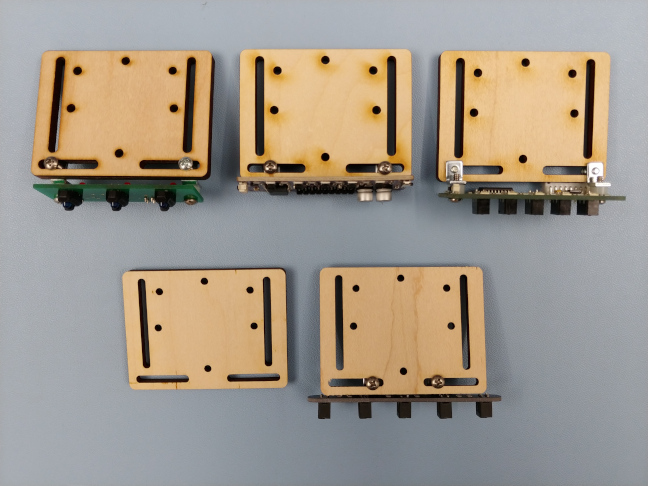
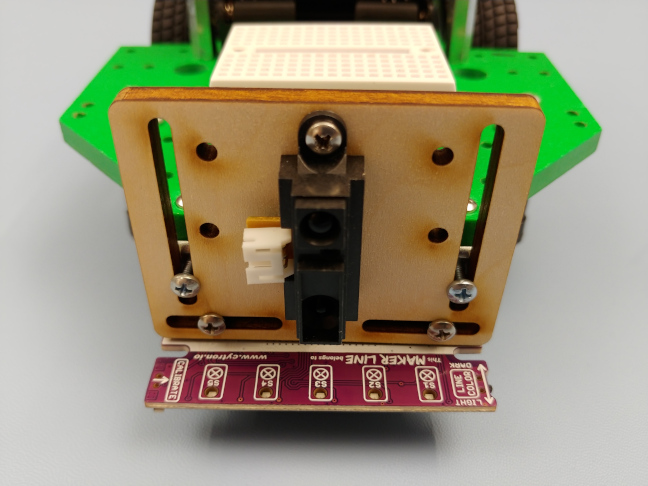
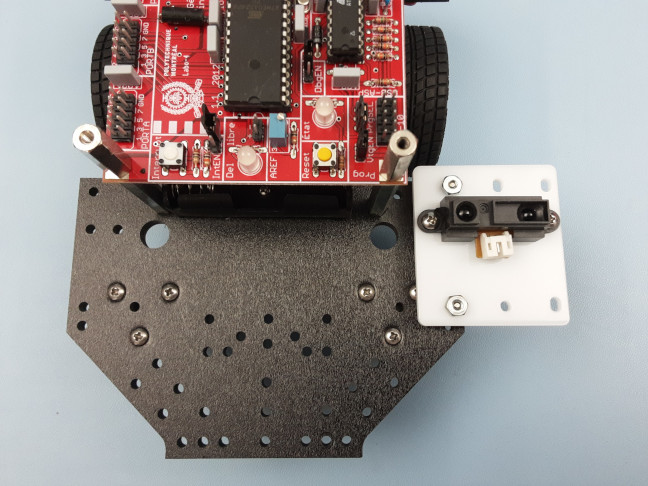
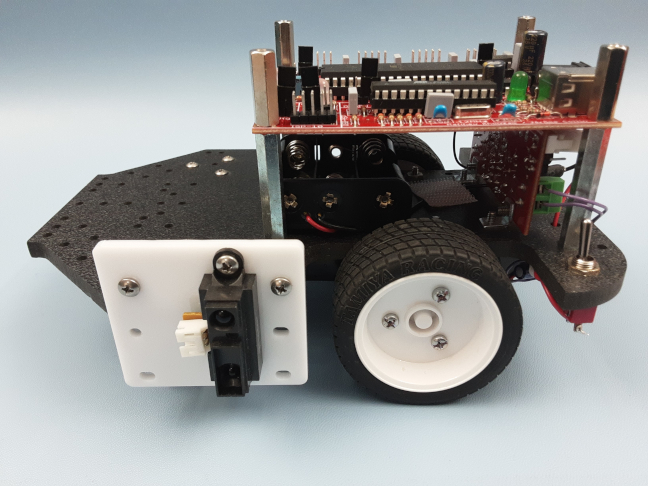
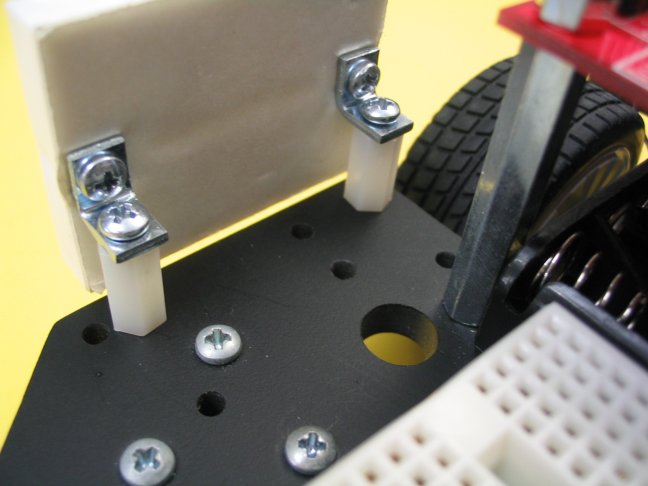
Le
support ne peut être installé qu’à l’avant du robot mais c’est
aussi l’endroit qui convient pour le suiveur de ligne en général.
Encore ici, des angles métalliques et des vis 4-40 de 1/4, 5/16e
ou 3/8e sont nécessaires avec pour relier le support à
la base du robot. Il est généralement plus facile de placer les
angles métalliques sous la base du robot pour visser par le dessus
car la situation inverse complexifie un peu l’installation du
support puisque les vis seront difficilement accessibles sans avoir à
retirer le suiveur de ligne du support dans un premier temps
puisqu’il faudra visser par le dessous.
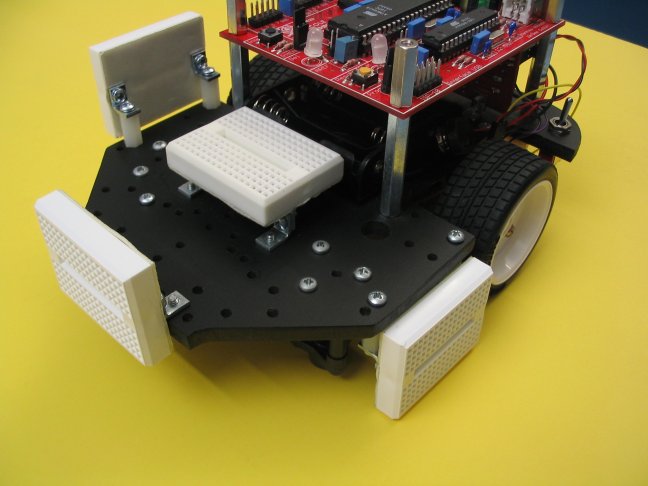
Support
supplémentaire pour les côtés du robot
Le
support universel de suiveur de ligne doit être employé à l’avant
du robot, car son utilisation ne fait pratiquement aucun sens
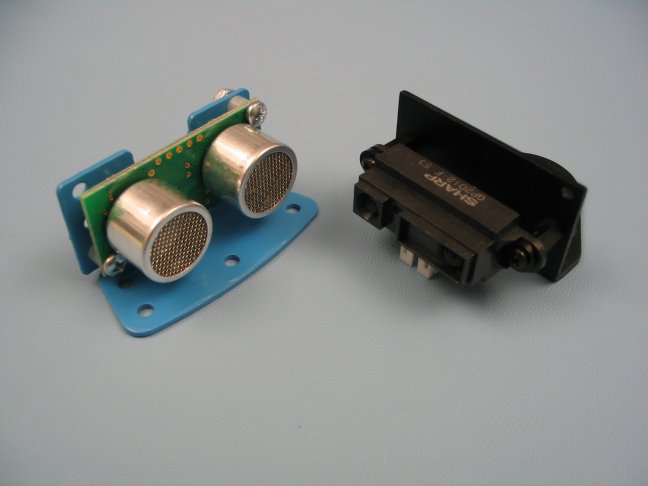
autrement. Cependant, le besoin de placer des capteurs sur les côtés
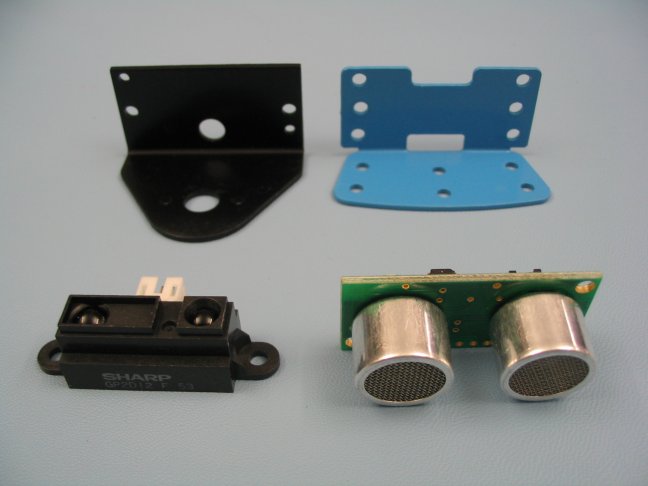
du robot peut se manifester. Un autre support flexible universel
pour le côté peut être utilisé, particulièrement pour installer
les sonars Devantech et les détecteurs infrarouges de Sharp. Il
requiert, lui aussi, des angles métalliques et des vis 4-40 pour
être fixé au robot en utilisant les trous espacés de 1.5 pouce,
nombreux sur les côtés du robot. Si le support doit être placé
parallèle à la base en PVC du robot, une tige d’espacement peut
être utile dans cette situation.
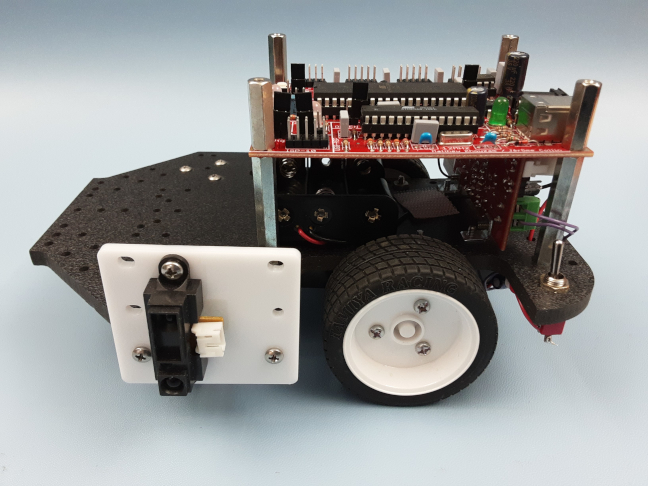
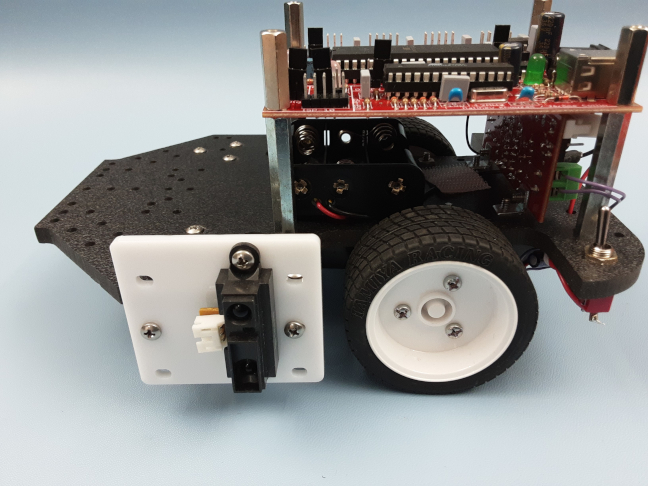
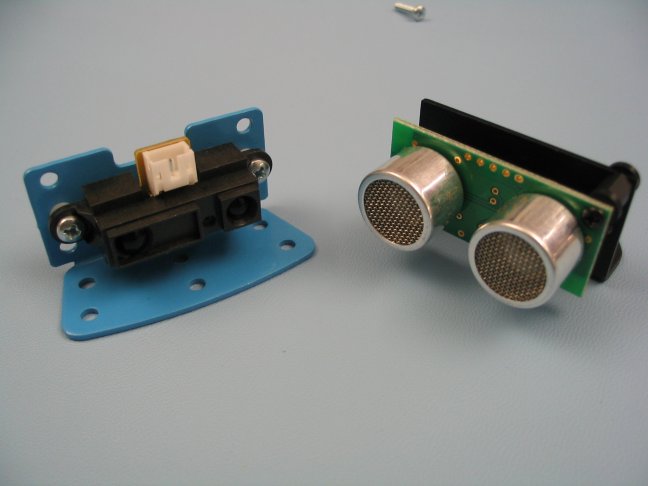
On peut
placer les capteurs à différentes hauteurs sur le support, et même
dans le cas des capteurs Sharp, à la verticale.
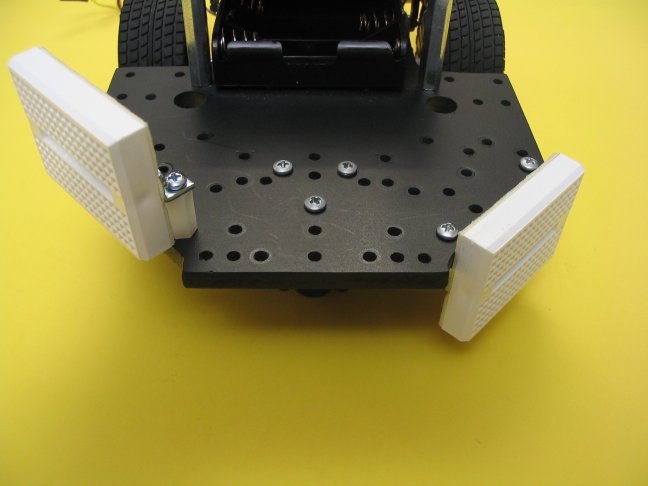
Le
support peut être positionné à différents endroits sur la partie
avant de la base du robot, même complètement à l’avant si
nécessaire.
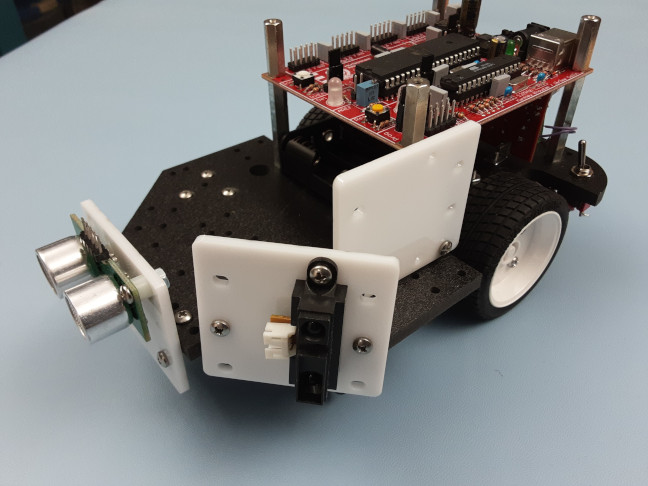
Le
support est surtout conçu pour être positionné de la façon qui
suit:
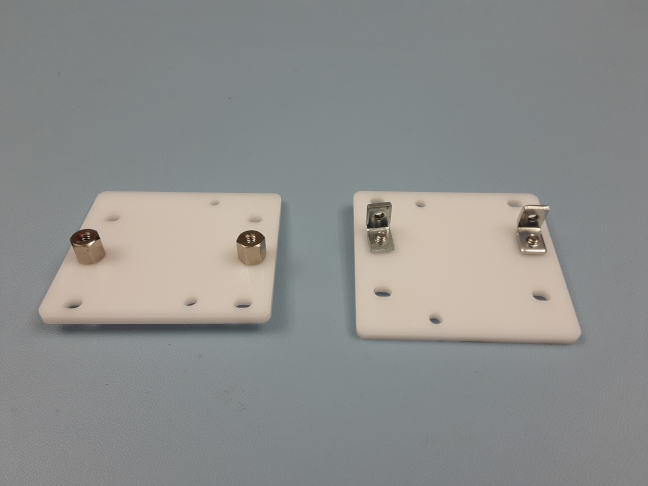
Support
universel Rogue
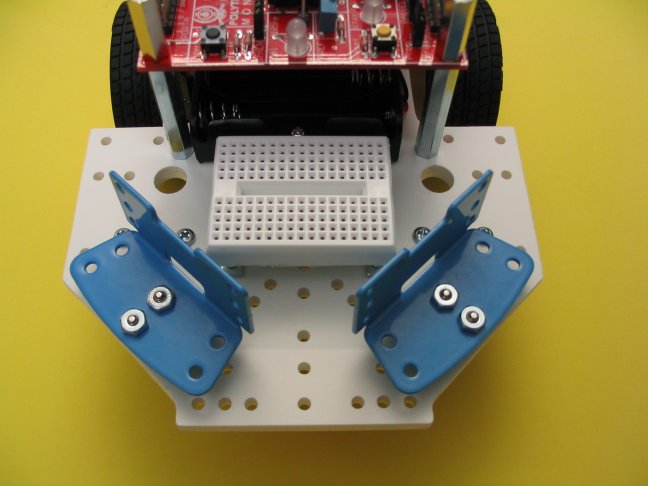
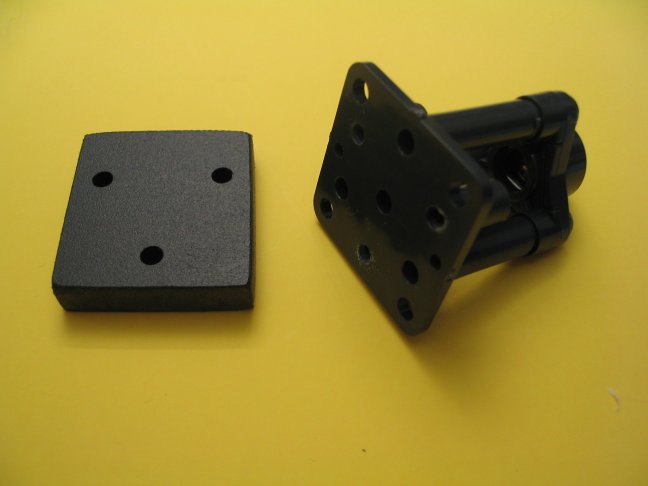
Le
support universel Rogue Robotics est très flexible. Il peut être
installé de multiples façons sur le robot pour supporter les sonars
Devantech et les détecteurs infrarouges de
Sharp.

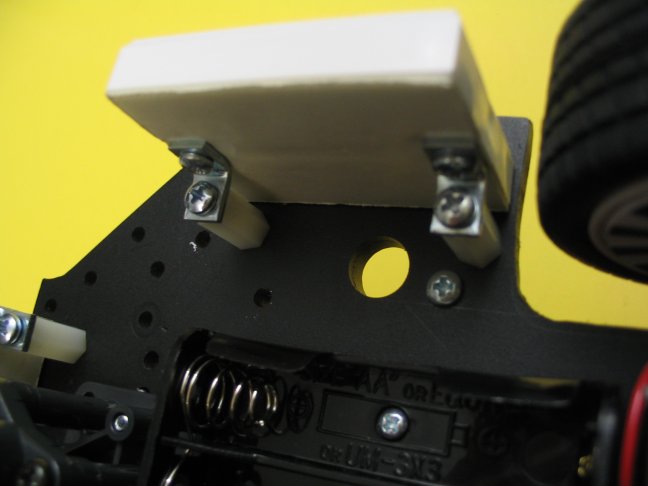
Il peut
être installé sur le dessus de l'avant de la base à angle droit ou
à 45°. La partie arrondie est généralement fixée sur la base à
l'aide de la paire de trous du centre, mais la partie en H peut aussi
être utilisée à cette fin. Dans ce dernier cas, il devient
possible d'installer un capteur qui pointe vers le haut. À noter
que des vis de type 4-40 de 3/8e ou 1/2 pouce sont souvent
utilisées pour l'assemblage.
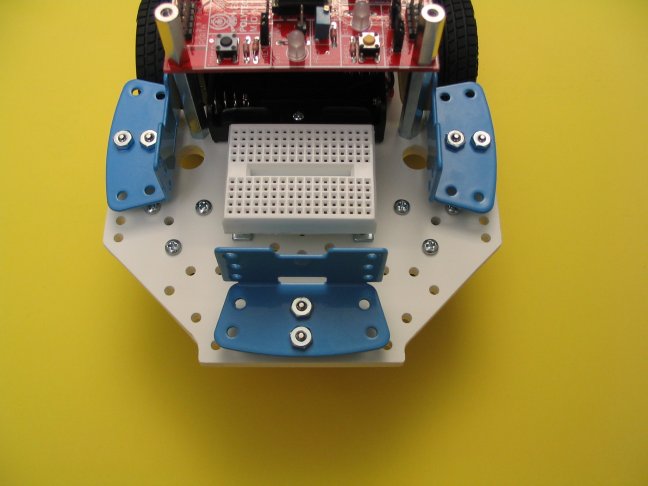
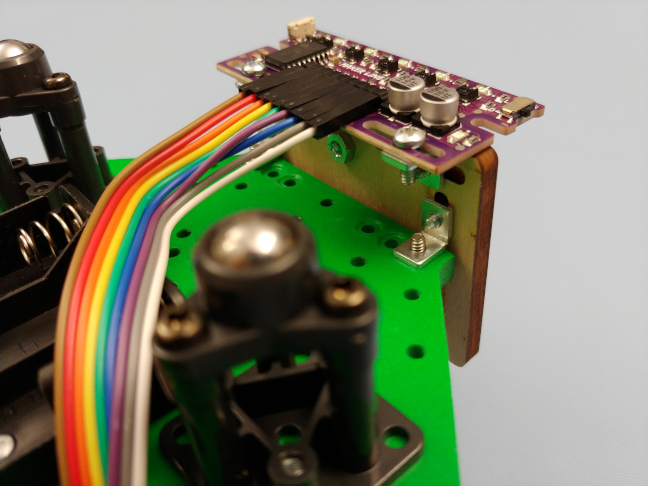
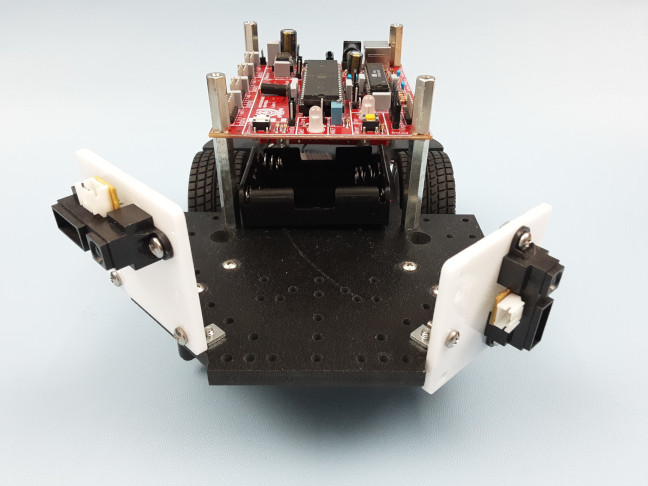
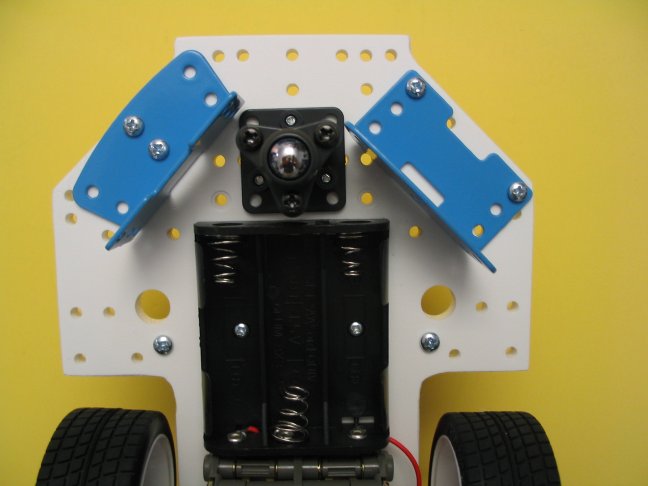
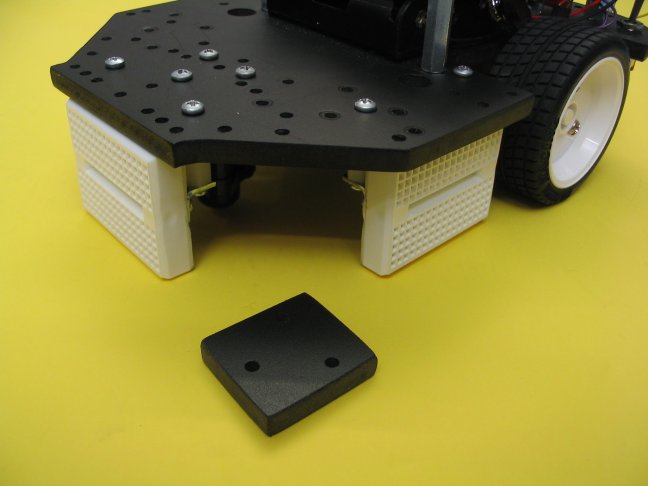
De même,
le support peut être monté sous
le robot. Dans ce cas, il arrive parfois qu'il faille enlever l'une
des deux roulettes de type boule à l'avant. Celle conservée peut
être déplacée vers le centre. Ce dégagement d'espace sur les
côtés peut être intéressant pour les parcours de type «suivi de
murs» où des capteurs de distance doivent prendre place
latéralement et souvent aussi près que possible du sol.
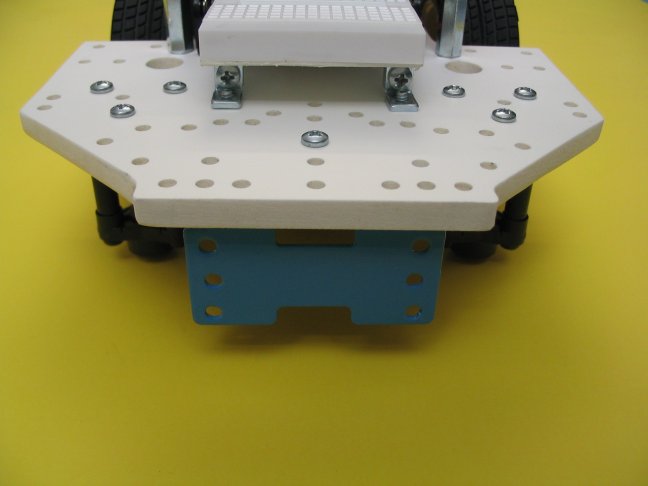
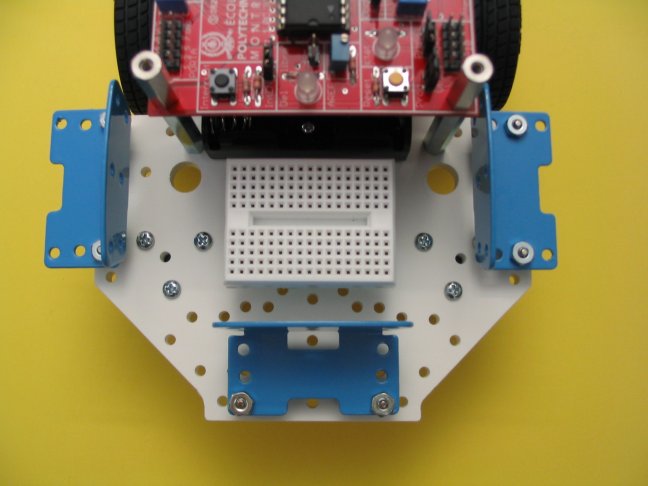
Il est
aussi possible de combiner trois supports Rogue pour former une
«couronne» pour avoir des capteurs pointant vers l'avant et sur les
côtés. Deux vis sur le support avant suffisent à maintenir
l'ensemble stable sur la partie avant de la base. Comme les capteurs
Sharp GP2D120 ne peuvent rien détecter à une distance inférieure à
4 cm, il est pratique de la positionner un peu plus loin des bords de
chaque côté. De cette façon, le robot peut pratiquement détecter
qu'il est en contact avec un obstacle puisque le capteur demeure
toujours éloigné à plus de 4 cm de l'objet à détecter.
Le
support Lynxmotion
Le
support
multiusage Lynxmotion/RobotShop
est semblable au Rogue, mais il est surtout conçu pour être
installé sur la roulette d'un servomoteur. De cette façon, le
capteur peut balayer l'horizon sur 180°. Tout comme le support
Rogue, il accepte les sonars Devantech et les détecteurs infrarouges
Sharp.
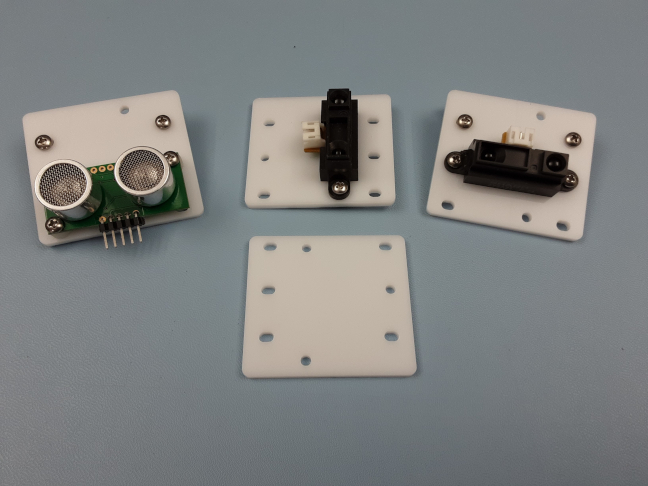
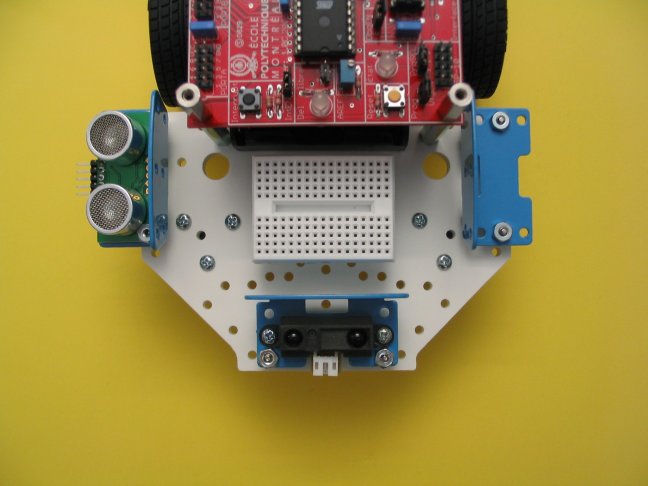
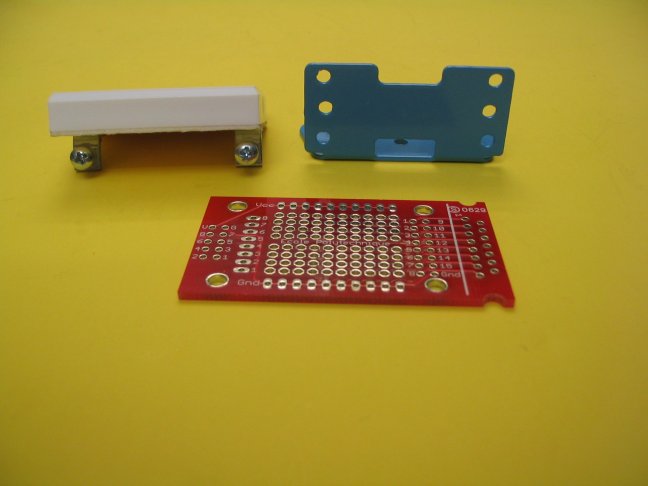
Le
breadboard et le petit circuit imprimé générique
Le petit
breadboard blanc peut être installé en de nombreux endroits
sur le robot. Ce n'est pas sans intérêt quand on sait que quelques
pièces électroniques placées sur un breadboard suffisent
pour réaliser un capteur efficace. La distance entre les trous
arrière du breadboard est de 1.5 pouce. Il en va de même
pour les trous de la partie en H du support Rogue. Les mêmes trous
peuvent donc servir pour le montage de plus d'un support ou d'un
capteur.
De même,
lorsque des composantes électroniques doivent être rassemblées et
soudées pour former un capteur complet, un circuit imprimé a été
conçu. Il dispose aussi de trous de montage espacés de 1.5 pouce
(et aussi de 1 pouce sur la hauteur). De cette façon, il peut être
placé aux mêmes endroits que le support Rogue ou le breadbeard.
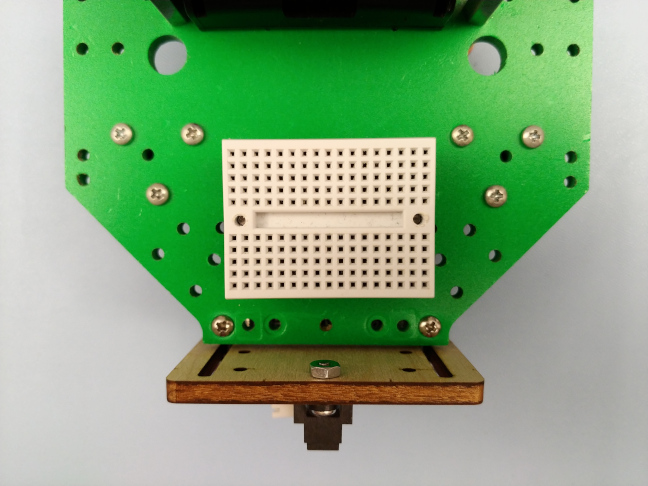
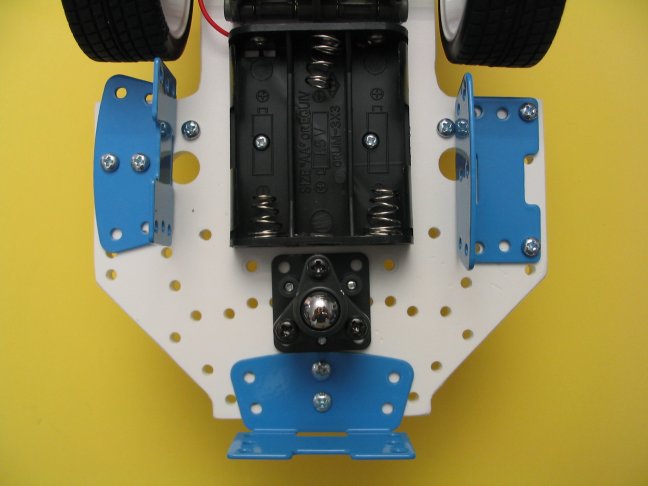
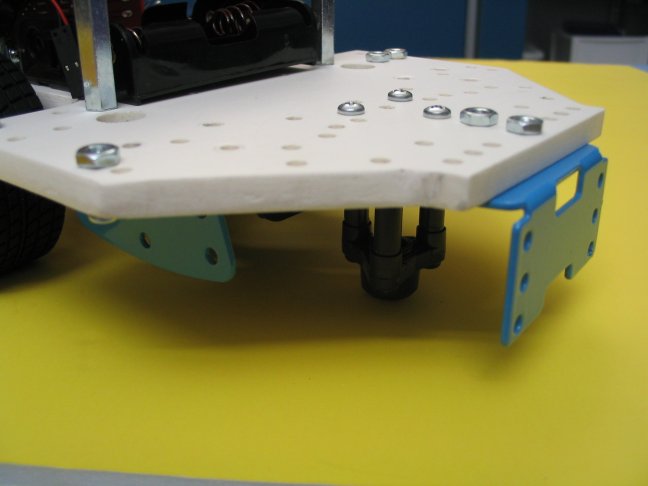
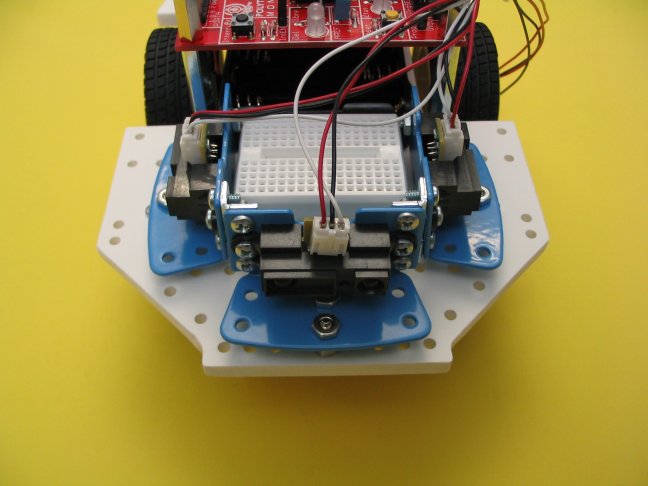
Il est
aussi possible de placer le breadboard sous la base, et même
de le soulever légèrement par rapport à la base. Il faut employer
une tige d'espacement de 0.5 pouce (Digi-Key: 1902CK-ND dans votre
ensemble de pièce de la carte mère) entre la base et l'angle
métallique. D'ailleurs, comme vous disposez de quatre de ces tiges,
vous pouvez les utiliser avec le support Rogue ou d'autres capteurs
si la position des objets à détecter justifie un léger décalage
par rapport à la base du robot pour augmenter l'efficacité de la
détection.
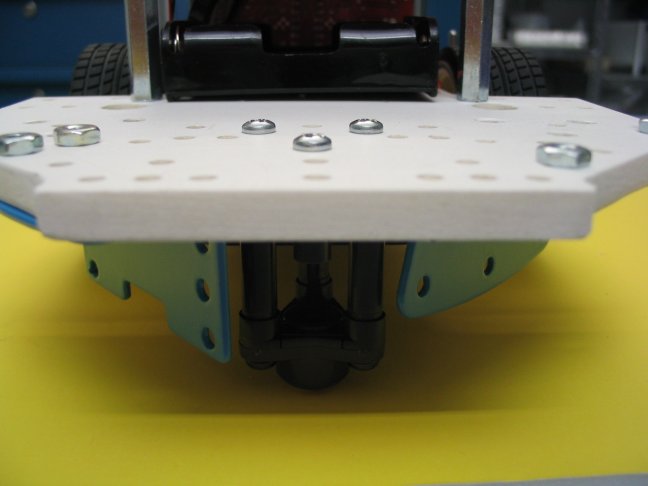
Lorsque
le breadboard est en position verticale sous la base, il rase
presque le sol. Sur une surface plane, les mouvements du robot n'en
seront pas gênés. Par contre, à la moindre discontinuité, le
coin du breadboard pourra accrocher un obstacle. On peut
alors placer un morceau de PVC de ¼ de pouce entre la base et la
roulette de type boule à l'avant. On peut ainsi gagner un
dégagement de près de 6 mm supplémentaires. Des rondelles
épaisses (washers) peuvent aussi convenir dans un tel cas
pour introduire le dégagement souhaité.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}