Articles
pour le cours
Il
vous faudra les articles pour la partie technique du cours.
La
boîte
Une
boîte par équipe de deux vous est fournie.
Pour simplifier les choses, chaque boîte est associée à un numéro
d'équipe. C'est donc en formant
votre équipe que vous obtenez
votre numéro d'équipe.
L'ensemble
comporte certaines pièces qui ne sont pas sur le robot. Elles ont
été regroupées dans des enveloppes et sachets et seront utilisées
pour certaines parties du projet.
Il
faut un câble USB pour programmer la carte. De plus, il faut qu'une
des extrémités ait un connecteur de type «B». Votre boîte
contient deux câbles USB. Ce sont des Assman - AK670M-2. Tout autre
modèle de même type fera l'affaire.

Votre
boîte contient 2 pinces à mâchoires minces (de marque Xcelite
378M). On peut s'en servir pour plier des broches de composants ou
pour retenir des pièces alors que l'autre main travaille avec un
autre outil (parfois même la deuxième paire de pinces!).

La
boîte contient aussi des pinces coupantes (flush cutter ou
shear cutter en anglais) (de marque Plato, modèle 170).
Elles peuvent évidemment couper des fils et des broches de
composants électroniques. Elles conviennent aussi très bien pour
détacher des pièces Tamiya de leur cadre de plastique lors du
montage des roues et des engrenages.

Un
autre type de pinces est nécessaire pour dénuder des fils. Les
pinces à dénuder (de marque SPC - 3613) sont utiles pour retirer
une gaine de plastique d'un fil pour conserver uniquement le ou les
brins de métal pour ainsi permettre de raccorder le conducteur à
une connexion quelconque. Il vous faudra ajuster la vis du milieu
pour limiter la fermeture des pinces. Normalement, le trou qui se
forme au bout des mâchoires lorsque les pinces sont refermées
devrait avoir à peu près le diamètre du ou des brins de métal
pour ainsi permettre de limiter la coupe uniquement à la gaine de
plastique. Il peut aussi être nécessaire de tourner la pince d'un
quart de tour autour du fil lorsqu'elle est refermée sur la gaine de
plastique. De cette façon, on s'assure de bien couper le plastique.
Il suffit alors d'y aller d'un mouvement rapide pour retirer la
partie à éliminer du reste du fil en les éloignant l'un de
l'autre.

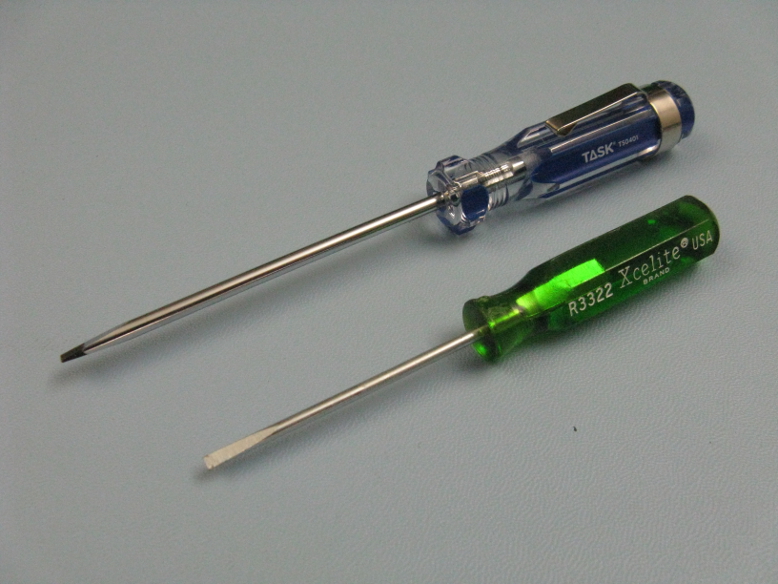
Deux
tournevis sont utilisés pour le montage. Le premier en est un de
type Phillips (pour vis cruciforme) de grosseur numéro 1. Il permet
évidemment de visser toutes les vis du robot lors du montage. Selon
les modèles qui changent très fréquemment dans les commerces, vous
êtes susceptibles de vous retrouver avec un modèle ou un autre,
mais ceci n'affecte en rien le montage du robot.

Le
second tournevis est pour les vis à tête fendue (ou plate) et de
couleur verte (de marque Xcelite R3322). Il est utilisé pour
diverses tâches qui n'ont parfois rien à voir avec les vis... Il
est très utile pour délicatement soulever une puce pour la faire
sortir de son support ou pour aider à glisser un morceau de métal
dans un connecteur, etc. Encore ici, le modèle peut changer selon
ce qui est disponible chez les fournisseurs.
Pour
bien bloquer un écrou 4-40 ou une tige d'espacement au moment même
où une vis est insérée avec un tournevis, il faut une clef simple
(de marque Unitool UT6108, Stanley 86-831 ou PowerBuild modèle
644000).

Pour
retenir une pièce alors qu'une soudure est en cours, il est bien
d'avoir une pince bloquante portant le nom français de brucelles
(blocking tweezers) (de marque Xcelite XHT412).

Autres
articles à se procurer
Lors
de l'utilisation des pinces coupantes, il est toujours possible que
des morceaux de plastique ou de métal soient projetés un peu
partout dans le laboratoire. Il faudra
porter des lunettes protectrices durant les premières semaines pour
éviter toutes possibilités de blessure aux yeux. Les personnes
portant déjà des verres correcteurs ne sont pas obligées de porter
des lunettes protectrices supplémentaires. Nous vous
recommandons les Uvex Falcon S4500 en vente à Coopoly.

Le
robot fonctionne à piles. Six de format AA et une de format 9 volts
sont requises pour faire fonctionner le robot. Les étudiants
devront s'assurer d'en avoir pour être capables de faire fonctionner
un robot sans en manquer (donc, prévoir la recharge...)

Beaucoup
d'instructions de montage précisent des mesures de longueur de fil,
de vis, etc. Il est très utile d'avoir une simple règle avec des
échelles métrique et impériale. N'importe quel modèle pourra
convenir.

Case
pour le rangement des articles
Le
département met à la disposition des étudiants du cours INF1900
une case pour chaque équipe de deux au local L-3811, pour les cases
de 1 à 60 et devant le local de classe L-2710 pour les cases de 61
à 126.
Le
numéro de la case qui vous est réservé est le même que celui de
votre boîte! Vous devez fournir vous-même le cadenas qui
sécurisera la case. Éviter de placer vos articles dans une case
autre que la vôtre, car votre cadenas risque d'être coupé et son
contenu saisit par les techniciens du département. À la fin de
la session, deux ou trois jours après les épreuves de robots à
l'Atrium, votre case devra avoir été vidée. Si un cadenas
verrouille toujours la case à ce moment, le cadenas sera coupé.



















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}