Recherche
de problèmes matériels avec le pont en H
Mise
en contexte
Dans
bien des cas, les roues du robot se mettront en marche dès que le
signal PWM se rendra au pont en H. Que faire si ce n'est pas le cas?
Le pont en H est un circuit intimidant en apparence. Il est vrai
qu'il s'agit d'un circuit électrique et qu'un informaticien peut ne
pas se sentir très à l'aise à le mettre au point. Mais il y a de
l'espoir. Le pont en H ne présente aucune forme de mémoire au sens
circuit logique du terme. Même si les courants et tensions
impliqués dans son fonctionnement ne sont pas toujours ceux des
circuits numériques, on peut arriver à le déboguer un peu comme
s'il s'agissait d'un circuit logique combinatoire simple.
Il est
tout à fait possible d'utiliser l'oscilloscope pour effectuer le
travail, mais ce n'est ni nécessaire ni la façon la plus simple d'y
arriver. Le multimètre est un outil plus efficace dans le contexte.
En plus, simplement promener les sondes du multimètre sur un
circuit de pont en H, fonctionnel ou non, peut constituer un bon
exercice pour maîtriser cet appareil
de laboratoire. Le reste de cette section est donc présenté un
peu comme un tutoriel pour prendre contact avec le multimètre tout
en vérifiant le fonctionnement du pont en H. Il y a peu de texte et
de nombreuses photographies pour faciliter l'exercice.
Le
multimètre
Le
modèle de multimètre disponible au laboratoire est très
sophistiqué et peut effectuer des mesures dans des situations
complexes. Deux modes seulement sont utiles à notre situation, le
test de continuité et la mesure de tension continue.

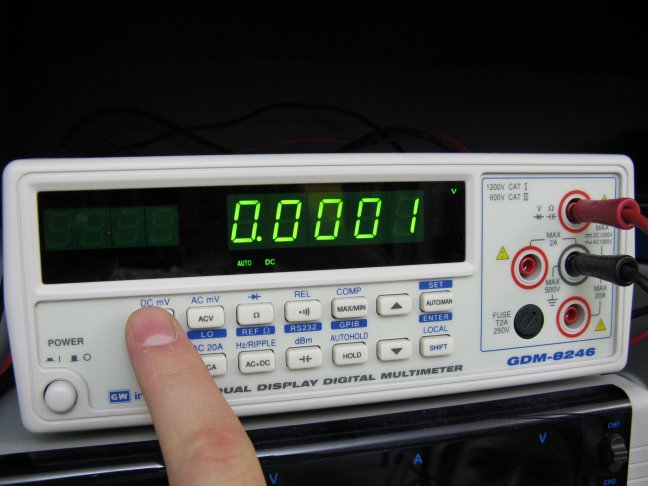
Après
avoir mis l'appareil en marche, on peut arriver à mesurer une
tension continue (DC – Direct Current) telle que celle
produite par les piles du robot. Il suffit d'appuyer sur le bouton
de la rangée du haut qui est le plus à gauche comme on peut le voir
sur la photographie suivante. Il suffit de prendre une pile et de
placer les sondes à ses bornes pour voir apparaître la tension
qu'elle peut fournir sur l'afficheur du multimètre si on veut faire
un exercice de base.
Sur
papier, les traits continus du dessin d'un circuit identifient
souvent un fil dans lequel passe un courant. Ce simple trait peut
cependant se matérialiser de bien des façons dans le circuit réel.
On ne peut jamais être assuré qu'il n'y a pas de discontinuité
dans un fil ou un ensemble de fils interconnectés dans un circuit.
De plus, il peut toujours y avoir des connexions indésirables dans
un circuit. On leur donne souvent le nom de courts-circuits
d'ailleurs. Bref, s'assurer de la continuité ou de la discontinuité
entre divers points d'un montage est une tâche qui revient souvent
en électronique.
La
continuité est, d'un point de vue électrique, une résistivité
quasi nulle. Il est tout à fait possible d'utiliser le mode
ohmmètre du multimètre pour faire le travail. Mais il y a plus
pratique. En appuyant sur le quatrième bouton de la rangée du
haut, le multimètre entre en mode «test de continuité».
L'appareil ne peut alors faire que deux choses. S'il n'y a aucune
continuité électrique entre les deux sondes, aucun son n'est émis.
Si les sondes sont électriquement reliées, l'appareil émet un son
continu. On peut tester ce cas en plaçant les deux sondes en
contact l'une contre l'autre. L'émission d'un son fait qu'il n'est
plus nécessaire de regarder l'écran du multimètre pour lire un
résultat. On peut donc déplacer les sondes sur le montage sans
relever la tête, ce qui est très pratique.

Quelques
tests de base
Le pont
en H est bien caché sous la carte mère à un endroit difficile
d'accès pour des sondes de multimètre. Il est recommandé qu'une
personne maintienne le robot dans un bon angle pour permettre à une
autre personne de placer les sondes aux bons endroits.
Un
premier test très important est de vérifier la continuité des
masses («Ground» - GND) de la carte mère et du pont en H.
Normalement, les points de test noirs de la carte mère et du pont en
H devraient être reliés électriquement. Si le test de continuité
indique le contraire, il faut pousser plus loin pour vérifier le
problème.
La carte
mère a ses trous de montage à la masse. Il est possible que l'une
ou l'autre des tiges qui maintiennent la carte mère soit trop lâche
ou ne soit pas en contact avec la pastille en étain du trou de
montage. Il suffit de poursuivre le test de continuité en touchant
l'une et l'autre des tiges pour vérifier jusqu'à quel point la
continuité est obtenue.
Une des
causes les plus fréquentes du problème est que l'oeillet métallique
est enfoncé dans le PVC de la base du robot parce que la tige de 1.5
pouce a été visée de façon trop serrée. L'oeillet au bout du
fil noir n'est alors plus en contact avec la tige pour assurer la
continuité. C'est pourquoi il est recommandé de placer l'oeillet
entre la carte mère et la tige de 1.5 pouce tel que montré dans les
instructions de montage (et non comme le montre les photographies
plus haut entre la base de PVC et la tige de 1.5 pouce).
L'autre
oeillet, celui entre l'angle métallique retenant le pont en H et la
base de PVC peut aussi poser problème si le serrage des vis a été
effectué avec trop de fermeté. Ce cas est cependant plus rare. Si
le problème se présente, il suffit de placer l'oeillet entre
l'angle métallique et le circuit imprimé du pont en H. De cette
façon, les éléments métalliques rigides ont plus de chances
d'être en contact entre eux et de ne pas être éloignés par des
appuis mous comme la base en PVC.
Pour
les photographies qui suivent, le pont en H a été démonté du
robot pour faciliter la prise des photographies et ainsi permettre de
meilleures illustrations des points en contact avec les sondes. Par
contre, il est recommandé de laisser le pont en H monté sur le
robot avec votre propre montage.
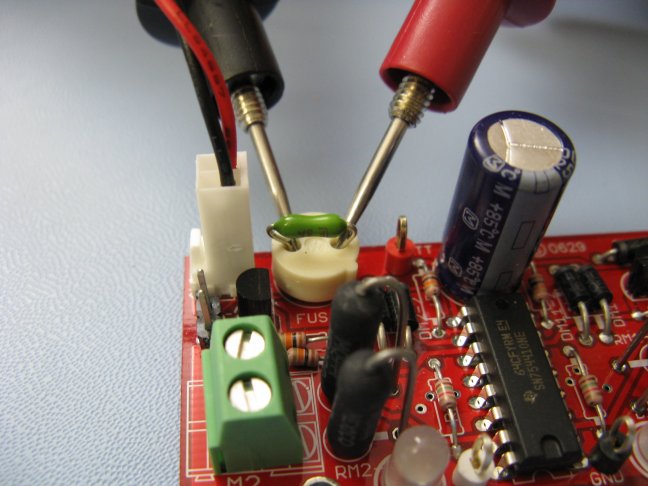
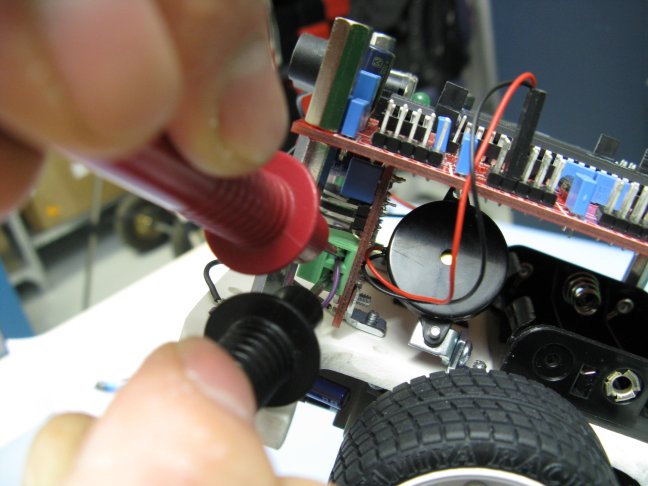
Lorsque
le courant alimentant le pont en H est trop fort, le fusible grille
et le circuit devient isolé de l'alimentation. Un fusible qui n'est
pas grillé ne s'oppose pas au passage du courant et offre une
continuité électrique qu'il est possible d'évaluer avec les sondes
comme le montre la photographie qui suit. Si le fusible est grillé
et ne conduit plus, il suffit de le remplacer. Par contre, avant
d'en placer un nouveau, il serait sage de savoir pourquoi il a
grillé! Il faut qu'il y ait eu une raison à la surcharge de
courant. Mauvaise soudure? Fils d'alimentation inversés? Contacts
indésirables entre le pont en H et d'autres parties métalliques du
robot? Court-circuit des fils violets menant aux moteurs? Autres?
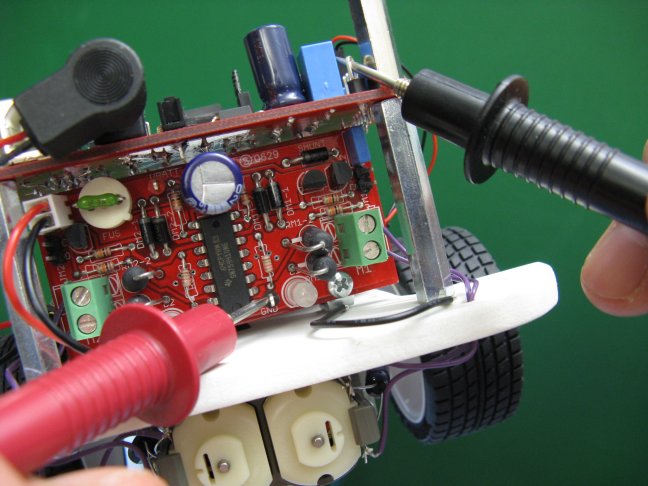
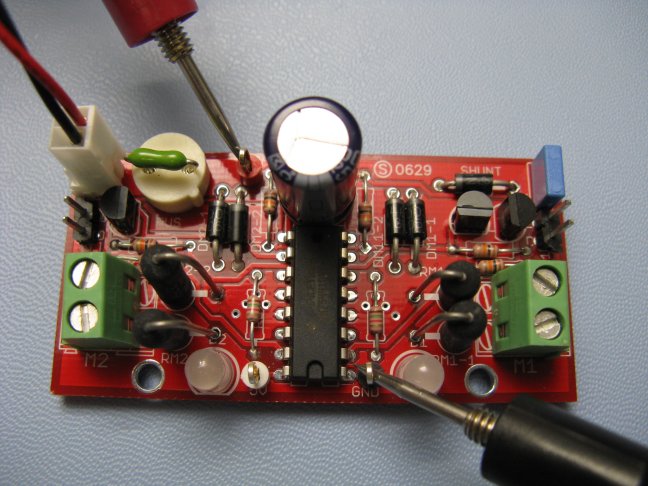
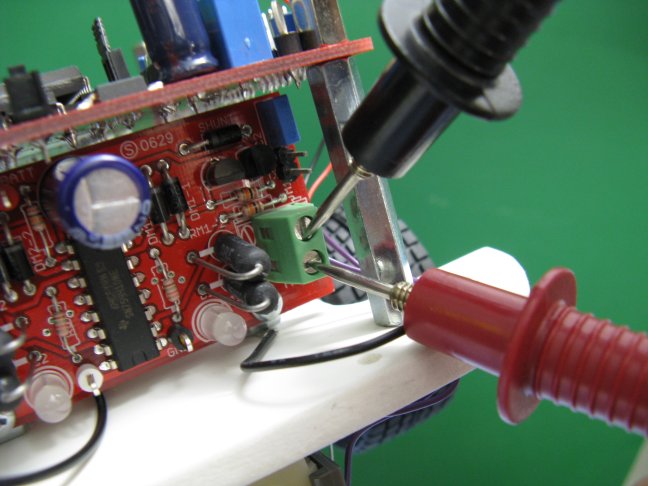
Un pont
en H doit être bien alimenté pour fonctionner. La mesure du
voltage en deux points permet de vérifier cet aspect. Le voltage
VBATT du
point de test rouge du pont en H devrait se situer entre 6 et 9 volts
selon la puissance des piles AA du robot. La photographie qui suit
montre les points sur lesquels déposer les sondes pour évaluer la
tension:
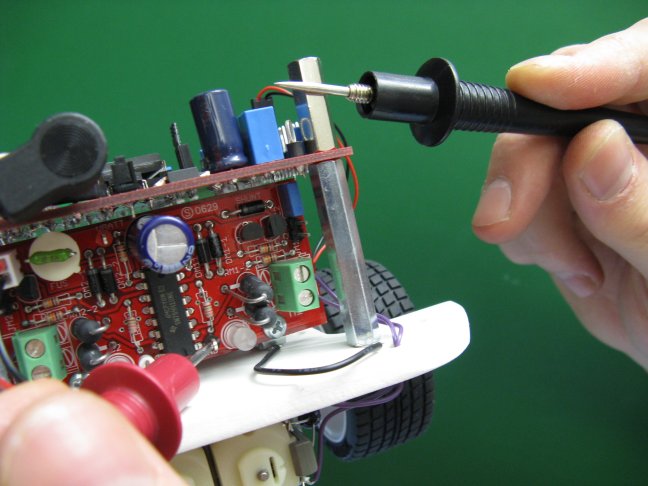
Le pont
en H a aussi besoin d'une tension bien régulée à 5 volts. Si le
régulateur 78L05 en noir opère correctement, le point de test blanc
5V devrait être à cette tension:
Problèmes
avec les composantes du pont en H
Les
quelques tests de base de la section précédente ont surtout permis
de vérifier les connexions du pont en H avec l'alimentation et la
carte mère. Les problèmes plus sérieux peuvent survenir si des
pièces soudées sur le circuit imprimé sont brisées. L'expérience
a montré que les trois pièces les plus susceptibles d'être
affectées sont les deux transistors 2N3904 et la grosse puce
centrale SN754410. Ce n'est pas un hasard, car ces pièces sont
faites de transistors sensibles aux décharges électrostatiques qui
ont pu se produire au montage (surtout si le temps était sec à ce
moment!). Les autres pièces sont relativement solides et ne causent
généralement pas de problème, à moins d'avoir été mal soudées.
Les
étapes suivantes visent donc à identifier exactement la pièce qui
pose problème. Généralement, à ce point-ci de la mise au point,
le problème n'apparaît que pour une roue, et souvent pour une seule
direction de rotation. Comme le pont en H est symétrique, on
présentera le débogage pour le côté droit du circuit sur les
photographies, mais en donnant les explications pour les deux côtés.
De plus, pour bien repérer les broches du SN754410, il suffit de
consulter cette
figure sur Wikipédia pour comprendre l'ordre de numérotation.
Il faut cependant comprendre que la puce de la figure a 8 broches
alors que le SN754410 en a le double. Le sens d'identification
demeure le même, comme il l'est pour toutes les puces au format DIP
(Dual
In-line Package)
d'ailleurs.
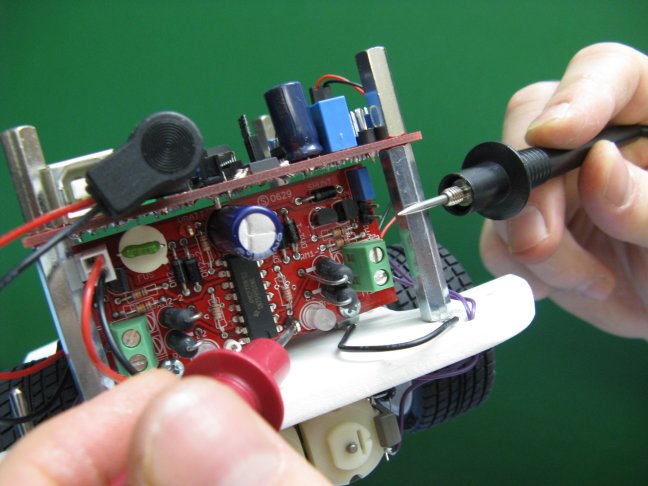
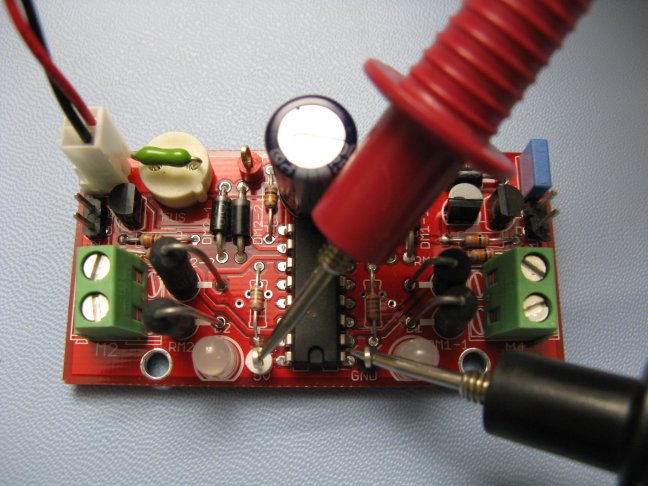
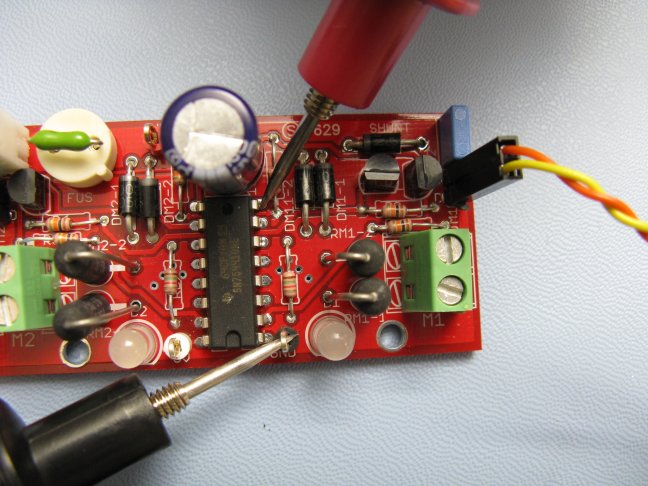
En
premier lieu, s'assurer que les broches 4, 5, 12 et 13 du SN754410
sont à 0 volt, car il s'agit des points à la masse de la puce. La
photographie suivante montre comment évaluer la tension de la broche
5 par exemple:
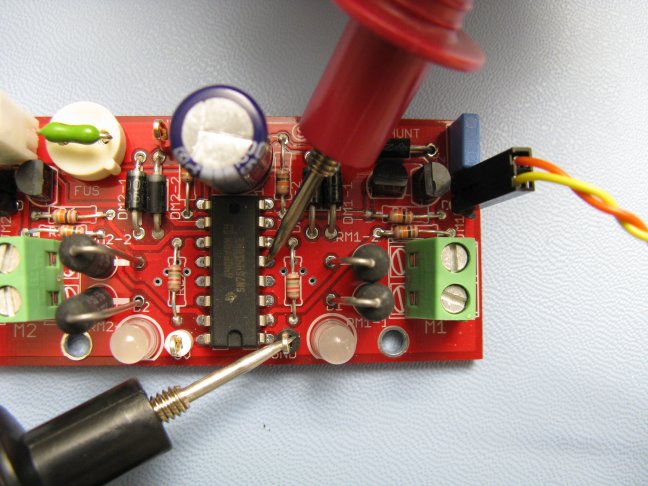
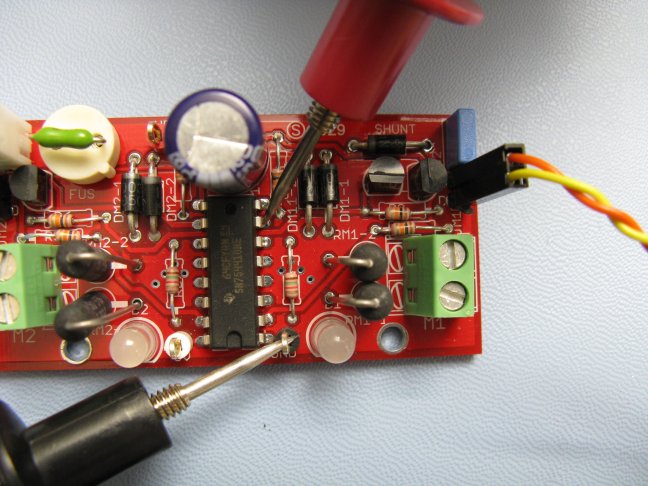
De même,
la broche 16 devrait être à 5 volts et la broche 8 à celle des
piles (VBATT – point de test rouge). La photographie
suivante montre l'évaluation de la tension sur la broche 8.
Si les
tensions mesurées précédemment ne sont pas celles attendues, il
n'y a pratiquement que les soudures qui peuvent être en cause. Si
aucun problème n'a été détecté jusqu'à maintenant, tout porte à
croire que les tensions d'alimentation se rendent aux bons endroits.
Il reste maintenant à vérifier si la logique de fonctionnement est
respectée.
Si l'on
regarde bien les valeurs d'entrée pour un côté du pont en H (donc
pour une seule roue), on constate qu'il y a deux entrées binaires.
Le signal PWM provenant de la carte mère doit être connecté sur
l'entrée «E» pour enable (fil orange sur les photographies)
alors que le signal de direction «D» doit correspondre à l'autre
entrée (fil jaune sur les photographies).
Deux
entrées binaires donnent uniquement 4 possibilités à tester.
Lorsqu'on poursuit l'analyse, on se rend compte que les cas ou E est
à zéro, il n'y a rien d'intéressant. La DEL devrait être éteinte
et la roue ne devrait pas tourner. Aucune tension n'alimente les
moteurs. Il ne reste donc à analyser que les cas ou E est à 1 et D
prend les valeurs 0 et 1. Pour aider à la mise au point, il est
recommandé de programmer la carte mère pour qu'un des ports,
n'importe lequel, produise une valeur constante 0111 sur les 4
premières broches. De cette façon, il devient très facile d'avoir
les deux «vecteurs de test» souhaités 01 et 11 en bougeant le
câble sur les broches de la carte mère. Chaque vecteur est une
combinaison des valeurs de D et E. Voici un programme
utilisant le port C et qui joue ce rôle.
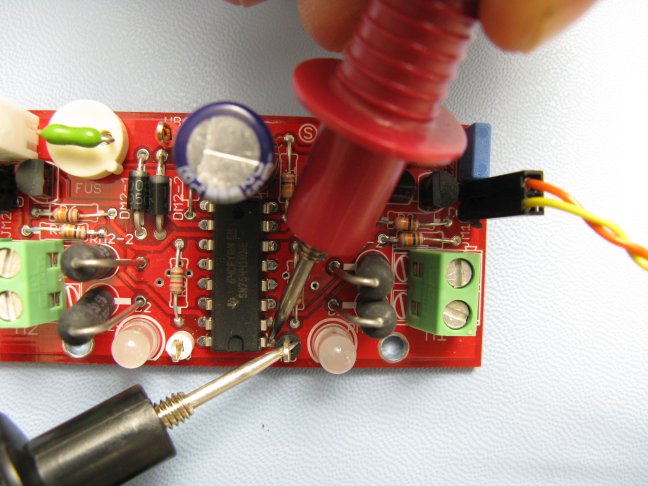
La
valeur de E est directement connectée à la broche 1 (ou 9 pour
l'autre roue) de la puce SN754410. Il suffit donc de s'assurer d'un
5 volts sur cette broche:
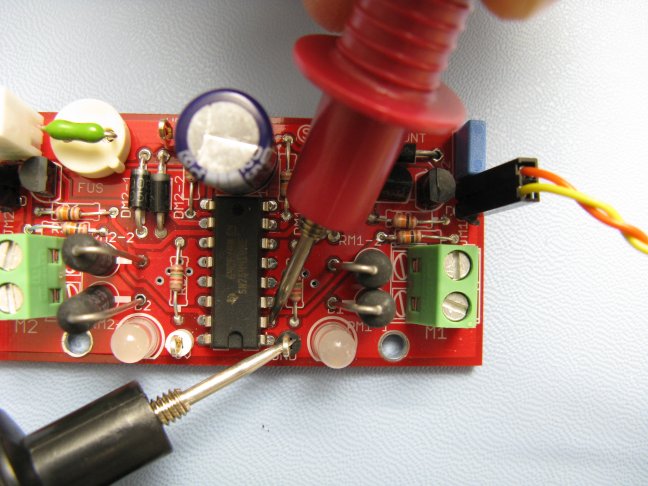
La
situation est plus complexe avec le signal D, car le fonctionnement
du pont en H nécessite d'avoir l'utilisation à la fois de D et de
son inverse (D «barre» dans le langage des équations logiques).
La présence d'un inverseur est donc requise dans le circuit. Ce
rôle est joué par les deux transistors 2N3904 et de quelques
résistances autour dans le montage. Le signal D de droite est relié
à la broche 2 et son inverse se retrouve sur la broche 7. De même,
le signal D de gauche se retrouve sur la broche 15 et son inverse sur
la broche 10. Les deux photographies suivantes montrent les lectures
de tension à effectuer sur les broches 2 et 7 respectivement:
Donc, il
faut vérifier deux cas pour chaque côté du circuit. Pour le côté
droit:
Si
D est à 0, la broche 2 doit être à 0 et la broche 7 à 1 (5
volts).
Si
D est à 1, la broche 2 doit être à 1 (5 volts) et la broche 7 à
0.
Pour le
côté gauche:
Si
D est à 0, la broche 15 doit être à 0 et la broche 10 à 1 (5
volts).
Si
D est à 1, la broche 15 doit être à 1 (5 volts) et la broche 10 à
0.
Si
l'inversion ne se produit pas, il y a de bonnes chances que le
transistor 2N3904 soit brûlé et qu'il faille le remplacer, ce qui
implique de devoir le dessouder. Pas simple... De même, si la DEL
ne change pas de couleur (du vert au rouge ou l'inverse), il y a fort
à parier que les transistors internes du SN754410 soient endommagés.
On peut, au besoin, mesurer la tension entre les broches 3 et 6 (11
et 14 de l'autre côté) pour s'assurer des inversions de tension,
car il s'agit des broches qui alimentent directement les moteurs et
les grosses résistances de puissance noires. Par contre, le
changement de couleur des DEL devrait suffire à confirmer la
présence d'un problème ou non. Il est vrai que de mauvaises
soudures peuvent toujours être en cause. D'ailleurs, à ce
point-ci, il est préférable de donner une dernière chance à une
inspection visuelle par un chargé de laboratoire puisqu'il est très
difficile, voire impossible, de dessouder la puce SN754410 et qu'il
faudra probablement remplacer le circuit au grand complet de toute
façon...
Connexions
aux moteurs
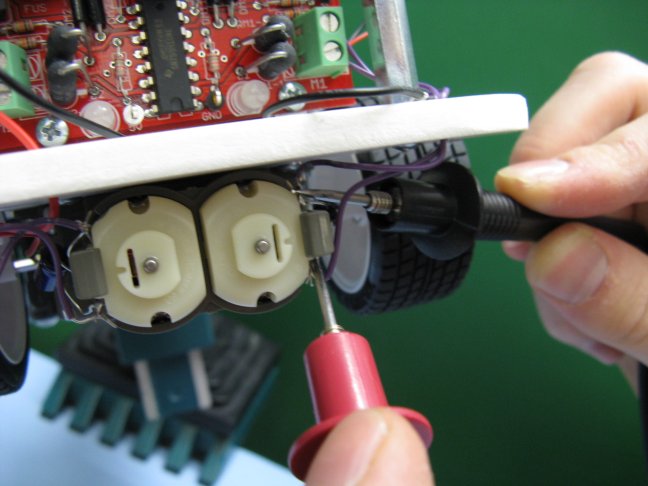
Si les
étapes précédentes n'ont pas montré de problème, il est probable
que les fils reliant le pont en H aux moteurs soient en cause.
Normalement, les DEL tournent au rouge ou au vert selon le sens de
rotation de la roue. Une DEL qui prend une couleur devrait provoquer
un mouvement de la roue. Si ce n'est pas le cas, on peut mesurer la
tension en trois points: aux bornes des vis des connecteurs de 5mm
en vert, aux sorties de ce même connecteur et aux bornes du moteur
comme le montre les trois photographies suivantes. Normalement, la
tension observée devrait être juste un peu inférieure à celle des
piles AA.
Le plus
souvent, le problème arrive lorsque la gaine de plastique des fils
violets est coincée dans le mécanisme qui retient le fil dans le
connecteur 5 mm vert. La gaine empêche le contact avec la partie
métallique du fil. La solution est simple. Il suffit de dévisser
les vis du connecteur pour en détacher les fils et de revisser ces
mêmes vis pour coincer la partie métallique du fil. Dénuder le
fil sur une plus grande longueur peut aussi aider à éviter de
coincer la partie métallique plutôt que la partie plastique.
S'il y a
une tension aux bornes des moteurs, mais que les roues ne tournent
pas, il faut simplement revoir le montage des engrenages. Un test
rapide à effectuer est de faire tourner une roue avec les mains.
S'il n'y a pas de résistance au mouvement amorcé par les mains, des
pièces d'engrenage sont manquantes et les moteurs ne peuvent
transmettre la puissance aux roues.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}