Pour
débuter avec le robot
Quelques
renseignements doivent être précisés pour expliquer le
fonctionnement global du robot. Il faut être capable de l’opérer
efficacement dès le départ en ayant des réponses à des questions
simples, particulièrement sur les branchements électriques. Le
robot est constitué de deux circuits électriques relativement
indépendants l’un de l’autre et alimentés par deux types de
piles différents.
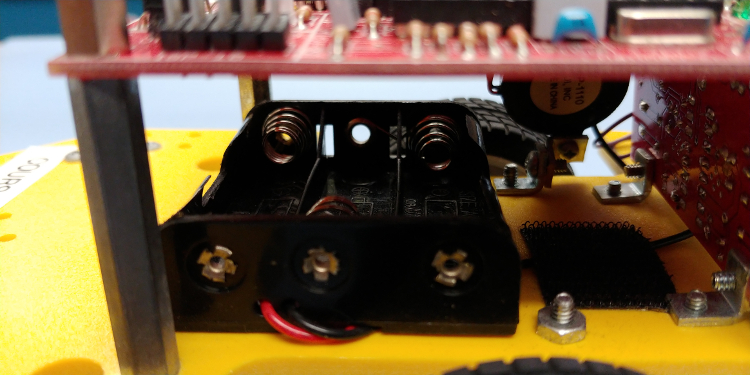
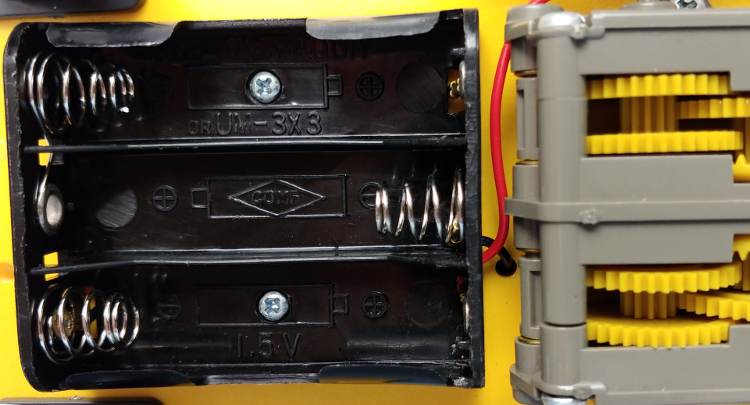
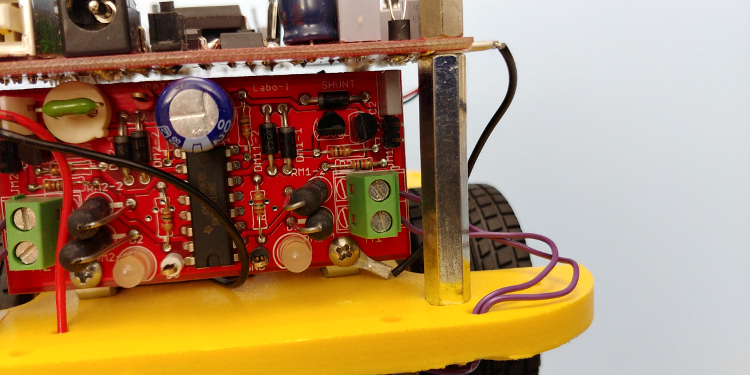
Le
premier circuit est celui assurant la motricité du robot. Il est
centré sur le pont-en-H qui est relié aux deux réceptacles noirs
identiques de trois piles AA situés sur et sous la base de PVC du
robot. Ces six piles AA reliées en série devront produire entre 6
et 9 volts pour alimenter le pont-en-H. Si le voltage tombe sous les
6 volts environ, les roues motrices arrière du robot risquent de ne
pas avoir assez d’énergie pour se mettre à tourner.
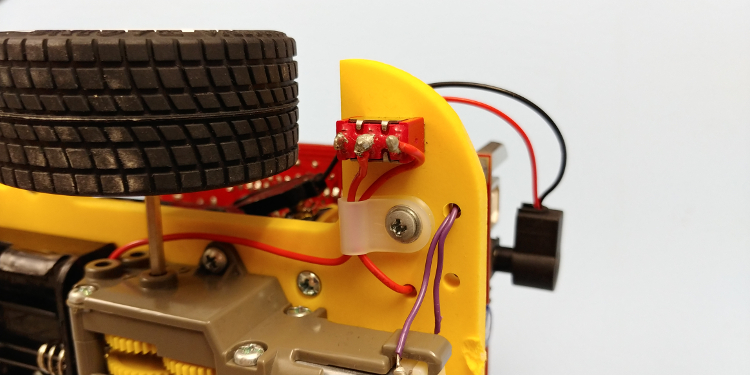
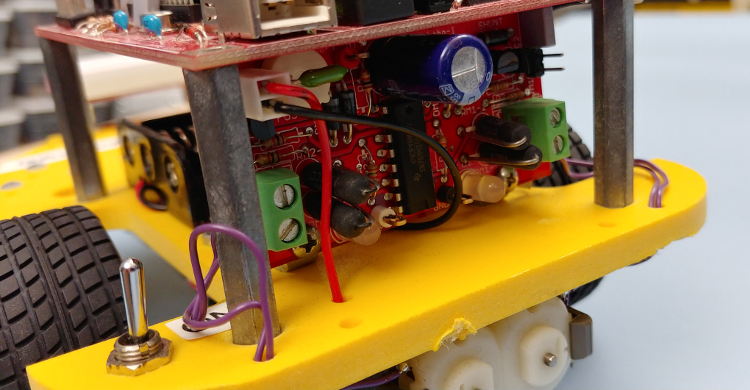
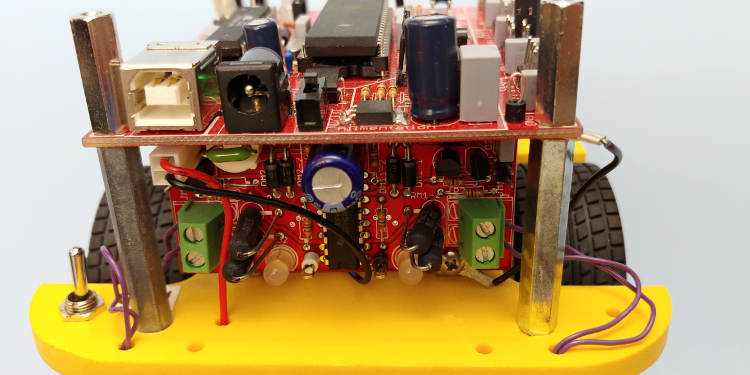
Avant
de se rendre au pont-en-H, les piles AA traversent l’interrupteur
rouge monté sur la base en PVC du robot, à gauche à l’arrière.
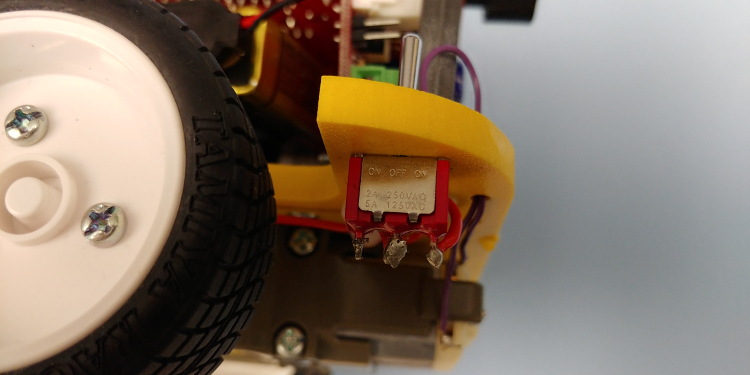
Il s’agit d’un interrupteur
de type SPDT
On-Off-On. Lorsque la tige de contrôle de l’interrupteur est
parfaitement verticale, le courant ne peut se rendre au pont-en-H.
Lorsque la tige est basculée vers l’une ou l’autre des deux
autres positions, un contact entre la borne centrale et l’une ou
l’autre des deux autres bornes situées au bas de l’interrupteur
se produit. Une de ces bornes aux extrémités provient des blocs de
piles AA tandis que la borne centrale est reliée à l’entrée
électrique du pont-en-H. L’interrupteur qui met en contact les
fils rouges soudés à ces deux bornes permet donc l’alimentation
du pont-en-H par les piles AA. La troisième borne de l’interrupteur
peut être libre ou reliée à un court bout de fil qui ne mène
nulle part. Cette disposition permet de relier cette borne à une
pince crocodile d’une source de tension au laboratoire. Cette
borne devient disponible pour être placée en contact avec la borne
centrale en basculant la tige de contrôle de l’interrupteur
complètement de l’autre côté par rapport à celle permettant
l’alimentation par piles. Cette flexibilité permet donc de couper
l’alimentation totalement, alimenter le pont-en-H par les piles AA,
ou encore par une source de tension reliée à l’interrupteur.
Le
fil noir provenant des blocs de piles AA est relié directement à
l’entrée électrique du pont-en-H. La borne négative des piles
AA devient donc la masse (ground) du pont-en-H directement.
Dans le cas où on alimente le pont-en-H avec une source de tension
au laboratoire, on doit relier la masse de la source (fil noir) avec
le point de test noir du pont-en-H pour obtenir l’équivalent.
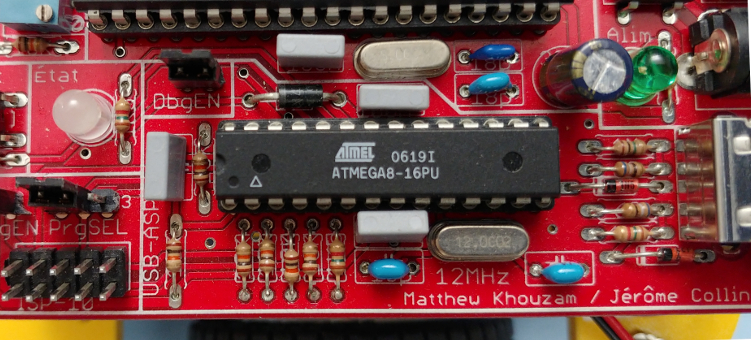
Le
deuxième circuit électrique indépendant est celui de la carte
mère. Pouvoir utiliser la carte mère soit de façon complètement
autonome, soit montée sur le robot, ou soit encore dans un autre
système, offre une flexibilité avantageuse. C’est la raison pour
laquelle ce circuit se veut aussi indépendant du circuit du
pont-en-H que possible. On peut alimenter la carte par le câble
USB. Ceci règle directement deux problèmes avec un seul câble:
alimenter la carte en énergie et pouvoir communiquer numériquement
avec un PC. Par contre, en apparaît deux autres. Le premier est
que la tension de référence numérique sur la carte est celle de
l’USB. On a donc un Vcc d’environ 4.2 volts, et non de 5 volts.
La carte peut très bien fonctionner à cette tension, mais il faut
en tenir compte lors des conversions analogiques par rapport à la
référence analogique Vref reliée au convertisseur. Aussi, la
carte devient liée avec un PC par le câble, ce qui n’est pas
toujours souhaitable avec un robot qu’on souhaite autonome.
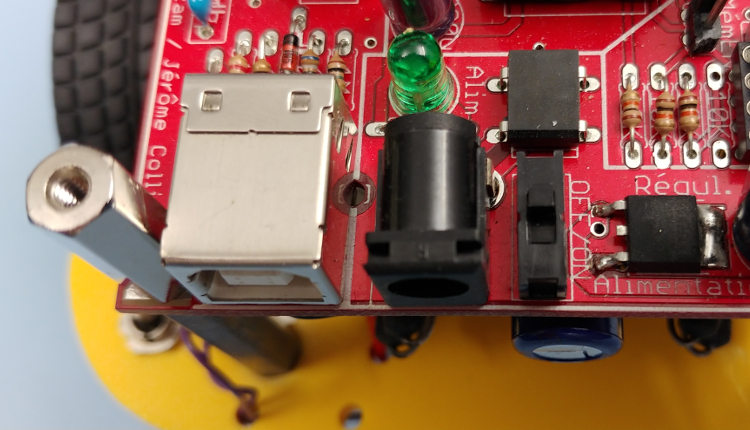
Pour
offrir une option supplémentaire, un connecteur noir de puissance de
5.5mm est situé tout juste à côté du connecteur USB et peut
accepter une tension entre 7 et 13 volts pour alimenter la carte.
Comme le voltage qui entre par cette prise doit être redressé et
régulé à +5 volts, la tension d’entrée doit être d’un
minimum d’environ 7 volts. On ne veut pas aller à une tension
trop élevée puisqu’on n’en tire aucun avantage. En courant,
une consommation de plus de 500 mA endommage une composante soudée
sur la carte et son remplacement nécessite un bon effort de travail.
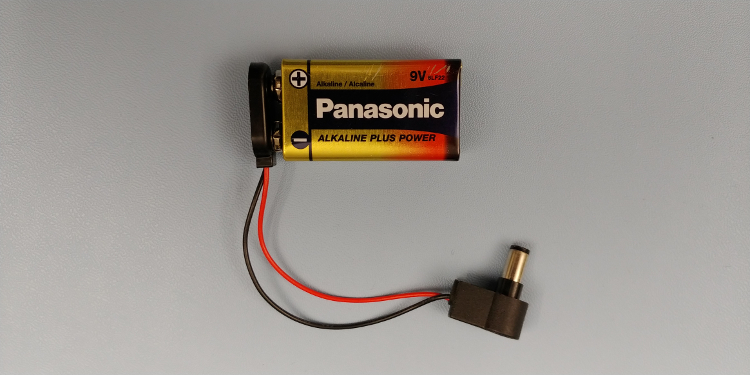
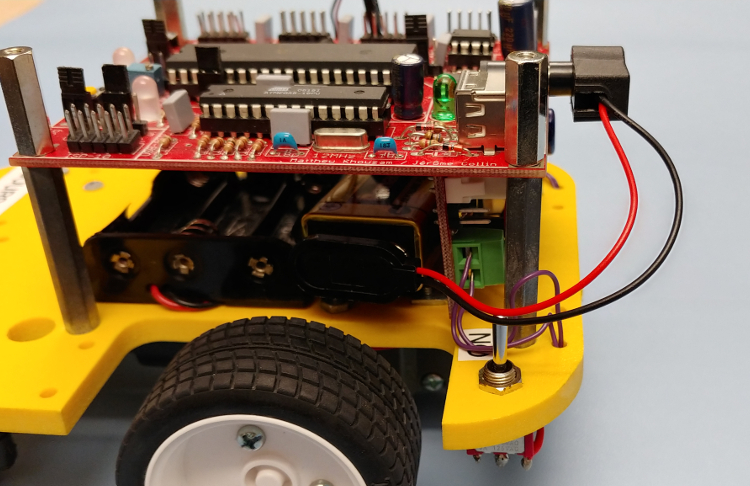
Ce
connecteur de 5.5 mm (diamètre extérieur) femelle recevra un
connecteur mâle de 2.1 mm (diamètre intérieur) pouvant provenir
d’une pile 9 volts rectangulaire ou d’une source de tension. La
pile 9 volts assure une autonomie au robot puisqu’il perd son
«cordon ombilical» qui le reliait au PC ou une source fixe de
tension. De plus, on peut facilement la glisser sous la carte mère,
tout juste à l’arrière du pont-en-H et éviter qu’elle ne nuise
aux déplacements du robot. Toujours avec un connecteur 2.1 mm mâle,
il est aussi possible de se servir d’une source de tension pour
alimenter la carte mère. Cette option permet d’économiser un peu
les piles, mais aussi de pouvoir limiter la source à fournir moins
de 500 mA ce qui évite les surcharges destructrices. Rien n’empêche
d’avoir une alimentation par le connecteur de 5.5 mm tout en ayant
le câble USB connecté à la carte au même moment.
Normalement,
la tension positive est au centre du connecteur de 5.5 mm et la masse
(ground) sur la partie métallique externe à l’intérieur
du petit boîtier en plastique noir. Toutefois, si l’inverse se
présente, la carte mère inverse la polarité automatiquement avec
son redresseur
en pont (rien à voir avec le pont-en-H). À noter aussi que la
carte mère a aussi son interrupteur lorsque l’alimentation se fait
par le connecteur de 5.5 mm. Il est noir et tout juste à côté du
connecteur de 5.5 mm justement. Lorsque la carte mère est
alimentée, la DEL verte d’indication de puissance s’allume.
Elle est située tout juste à gauche du connecteur de 5.5 mm.
L’usage
du connecteur de puissance de 5.5 mm sans le câble USB rend le
microcontrôleur ATmega8 de la carte mère complètement inutile
puisqu’il n’y a plus d’échanges par USB avec le PC. En
conséquence, ce ATmeag8 n’est plus alimenté sur la carte mère
dans cette situation ce qui permet de réduire la consommation
d’énergie et qui fait que la DEL d’état de la carte mère n’est
plus allumée en vert pour les mêmes raisons.
Les
deux circuits électriques, celui du pont-en-H et celui de la carte
mère ne sont pas complètement indépendants pour autant, car la
carte mère doit envoyer des signaux au pont-en-H pour qu’ils
soient interprétés de façon appropriée. Ces signaux ont une
certaine tension (zéro ou 5 volts), mais cette tension doit être
par rapport à la référence commune. C’est pourquoi un fil noir
sur le robot relie la masse de la carte mère à la masse du
pont-en-H pour en former une seule commune. Il faut savoir que les
trous de montage des circuits imprimés du pont-en-H et de la carte
mère sont aussi reliés à la masse. Passer des vis en leur centre
pour atteindre des tiges ou oeillets métalliques étend la masse à
ces pièces ce qui est fort utile lors de l’utilisation d’un
multimètre dont l’une des sondes doit être reliée à la masse.
On peut donc la mettre en contact avec ces pièces métalliques au
besoin si les manipulations s’en trouver facilitées avec
l’appareil de mesure.
Si
ce fil noir se rompt, le robot semblera fonctionner de temps à
autre, mais refusera d’avancer ou de reculer à certains moments
même si les signaux envoyés au pont-en-H sont bons, ce qui est
particulièrement embêtant et difficile à déboguer puisque les
symptômes sont intermittents. Un test de continuité entre le point
de test noir de la carte mère et celui du pont-en-H permet
facilement, et surtout rapidement, de confirmer la bonne connexion du
fil noir, en cas de doute.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}