Sertissage
des fils
Pour le
sertissage, il faut utiliser les fils multibrins. Laisser les fils
faits d'un seul brin solide à l'intérieur de la boîte de robot,
car ils sont utilisés uniquement pour relier des composants sur le
breadboard
ou pour relier les moteurs au circuit du pont en H. Il faudra
prendre 14 fils en vue de faire 7 câbles. On utilisera donc 14
connecteurs Molex à 2 positions (Digi-Key: WM2800-ND) avec les
morceaux de métal mâles (Digi-Key: WM2517-ND) et femelles
(Digi-Key: WM2510-ND). Il vous faudra utiliser votre paire de pinces
à dénuder. De plus, il vous faudra de
l'aide du chargé de
laboratoire pour compléter cette partie avec un outil approprié qui
est une paire de pinces à sertir. L'opération est expliquée dans
la section «sertissage» du guide
de montage et de soudure.
L'arrangement
des câbles devra suivre ce qui est décrit dans le tableau suivant:
|
Rôle
du câble
|
Couleur
des fils
|
Terminal
#1
|
Terminal
#2
|
|
Alimentation
du breadboard
|
rouge
|
femelle
|
mâle
|
|
noir
|
|
Pour
les données allant au breadboard
|
gris
|
femelle
|
mâle
|
|
vert
|
|
Pour
les données allant au breadboard
|
brun
|
femelle
|
mâle
|
|
bleu
|
|
Pour
relier la DEL libre sur la carte mère
|
violet
|
femelle
|
femelle
|
|
blanc
|
|
Contrôle
du circuit du pont en H
|
orange
|
femelle
|
femelle
|
|
jaune
|
|
Contrôle
du circuit du pont en H
|
orange
|
femelle
|
femelle
|
|
jaune
|
|
Fil
libre pour usage général
|
rouge
|
femelle
|
femelle
|
|
noir
|
On peut
donc voir que les câbles qui doivent aller au breadboard ont
un de leur bout avec des morceaux de métal. Dans tous les autres
cas, les câbles ont des connexions femelles à leurs deux bouts. Il
faut dire que le terminal #1 de chacun des câbles sera toujours
inséré dans les connecteurs IDC au haut de la carte mère.
Autrement dit, une des extrémités femelles sera toujours connectée
à deux broches d'un des ports A, B, C ou D du ATMega324PA.
La
longueur de tous les fils devrait être d'environ 7 pouces. La seule
exception est la longueur des fils orange et jaunes qui peut être
raccourcie à 5 pouces puisque la carte mère est proche du circuit
du pont en H sur le robot. Un chargé de laboratoire vous fournira
une paire de pinces pour le sertissage des fils. Il faudra par
contre avoir regroupé vos pièces et avoir en main une pince à
dénuder des fils. Sur les photographies plus bas, les fils ont été
torsadés. Il s'agit d'une bonne pratique de le faire puisque
l'ensemble du câble devient ainsi plus solide. De plus, il sera
plus facile de suivre visuellement l'ensemble des câbles sur le
robot lors de la mise au point et du déverminage.
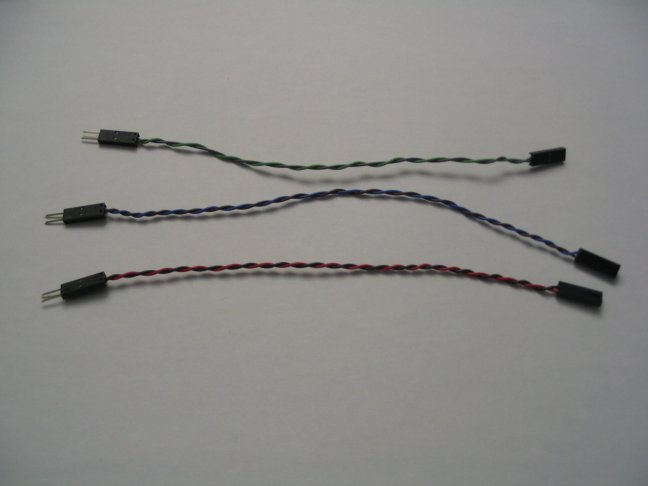
Les 3
câbles reliant le breadboard à la carte mère ressembleront
donc à ce qui est illustré sur la photographie (remarqué les bouts
mâles à gauche).
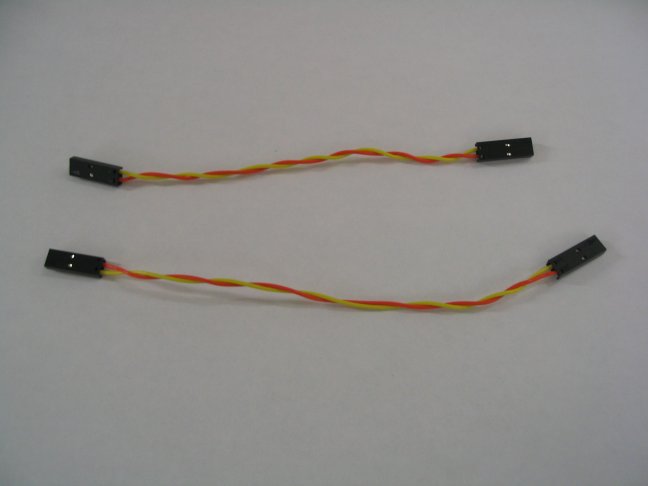
Les fils
qui relieront la carte mère et le circuit du pont en H pour le
contrôle des moteurs auront l'apparence suivante.
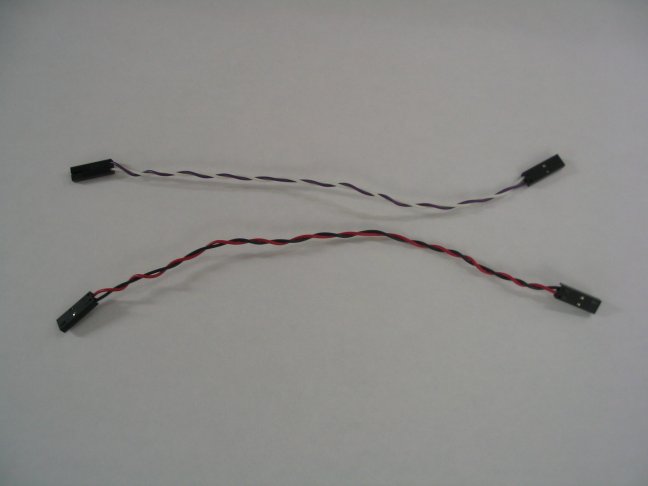
Les deux
derniers câbles:
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}