Assemblage
des moteurs et des roues
Il
arrive très souvent que l'on porte une attention particulière au
soudage, au point de négliger le montage mécanique. Pourtant, la
partie mécanique demande autant de temps de montage que le soudage,
sinon plus...
Les
roulettes libres de type boule
Il y a
deux types de roue sur le robot, les roues libres et les roues
motrices. Une roue libre est, en fait, une bille de métal retenue
dans un boîtier de plastique (ball caster en anglais,
roulette de type boule en français). Ce sous-composant est fabriqué
par la compagnie Tamiya et est fourni avec le robot dans un sachet.
Ouvrez ce sachet et suivez les instructions qui se trouvent à
l'intérieur. Veuillez prendre garde à l'étalement des pièces sur
la surface de travail; beaucoup d'entre elles sont très petites et
roulent facilement. Il ne faut en perdre aucune. On conseille
d'utiliser des pinces coupantes pour détacher les morceaux de
plastique. De plus, il est suggéré de placer les pièces dans le
cadre qui reste une fois que les morceaux de plastique ont été
détachés de leur support. On aura besoin des 2 roulettes fournies,
une pour chaque côté du robot. On montera le boîtier de plastique
donnant l'ensemble le plus haut (height:
37mm de l'instruction numéro 4 au verso). Il est inutile
de monter les roulettes et leur support sur le robot immédiatement.
Cette étape se fera plus tard dans le montage. Les quelques
instructions qui suivent complètent celles fournies par le
fabricant.

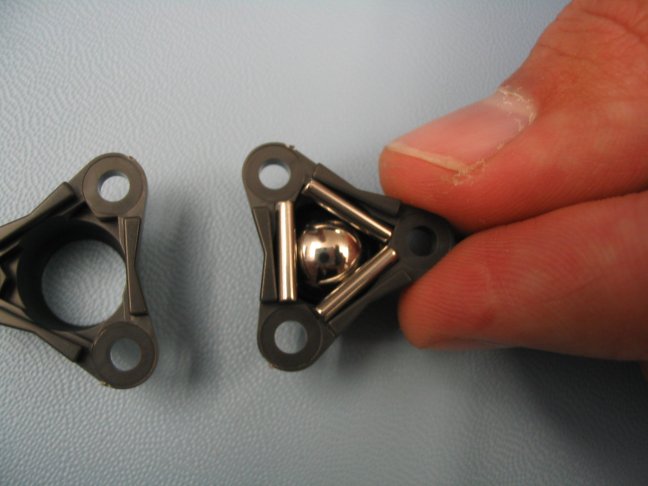
La bille
est emprisonnée par deux parties de plastique. Quelques roulements
cylindriques disposés en triangle permettent de réduire la friction
entre le plastique et la bille.

Les deux
morceaux de plastique qui enferment la bille doivent maintenant être
montés sur les plus hautes tiges du support. Il
ne faut pas oublier d'insérer les petites bagues entre les deux.
Votre robot aura des problèmes plus tard dans la session sans la
présence de ces bagues d'espacement. Pour bien retenir
l'ensemble avant de monter sur le support, il est préférable
d'utiliser votre pince bloquante ou 4 mains. Procéder soigneusement
sous peine de ramasser tous vos petits morceaux sous la table un peu
partout…

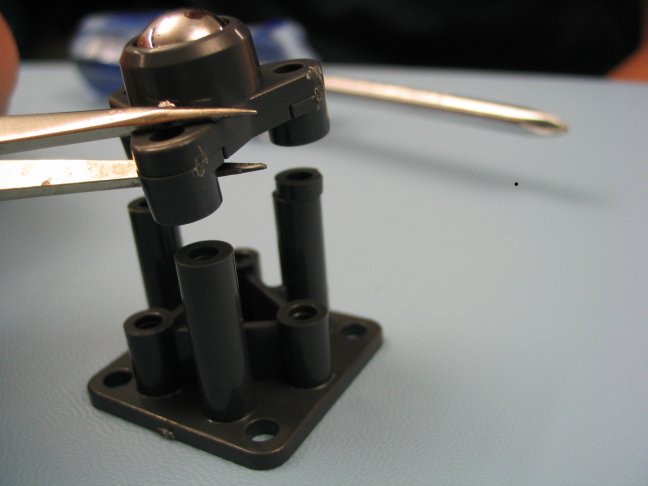
Le
résultat final:

Note:
jeter les pièces restantes. Surtout, n'utilisez pas les vis dorées
durant le reste du montage du robot. Elles sont de mauvaise qualité
et on préférera utiliser les vis standards grises en métal
fournies avec le robot.
Le
bloc moteur-engrenage
Le
moteur et l'engrenage complètent l'ensemble des composants fabriqués
par Tamiya que l'on utilisera (boîte avec l'inscription «Twin-Moteur
Gearbox»). Encore une fois, ouvrez la boîte et suivez les
instructions qui s'y trouvent. On adoptera la configuration «Low
speed (203:1 gear ratio) - C type» pour le montage des roues
d'engrenage. Les instructions sont en majorité au verso de la
feuille d'instructions. Ne pas monter les roues motrices sur
l'ensemble moteurs-engrenages immédiatement. Il faudra passer des
fils plus tard le long des moteurs et les roues seront trop
encombrantes. De même, ne montez pas l'ensemble moteurs-engrenages
sur le robot tout de suite (donc, ne pas suivre la partie «Securing
Gearbox» des instructions de Tamiya. De plus, il sera plus facile
de souder les fils devant aller aux bornes des moteurs si ces
derniers ne sont pas insérés dans la boîte d'engrenage tout de
suite. Il faut donc retarder quelque peu l'instruction «Installing
Motors» également.
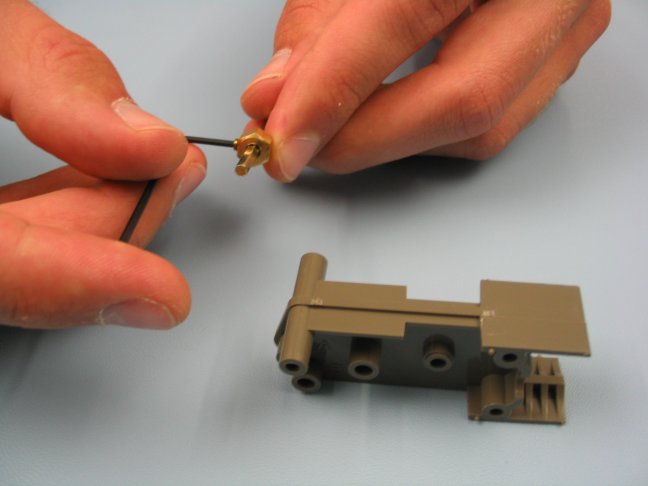
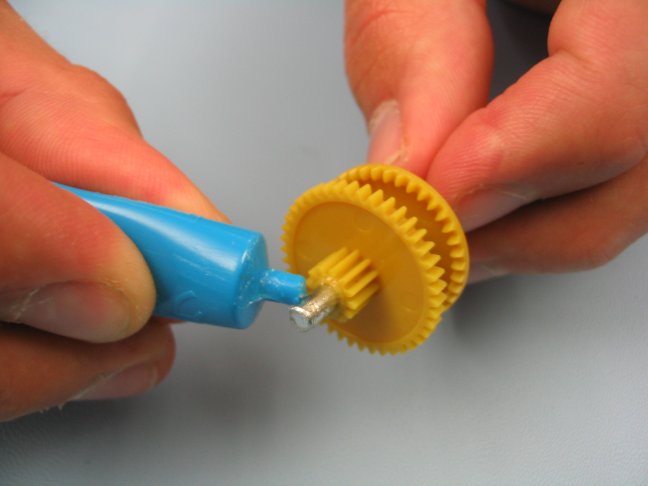
Une des
premières étapes du montage sert uniquement à donner la bonne
position d'une bague hexagonale sur un essieu comme le montre les
photographies. La tige se positionne dans un trou de façon
temporaire, juste le temps de serrer la bague au bon endroit.
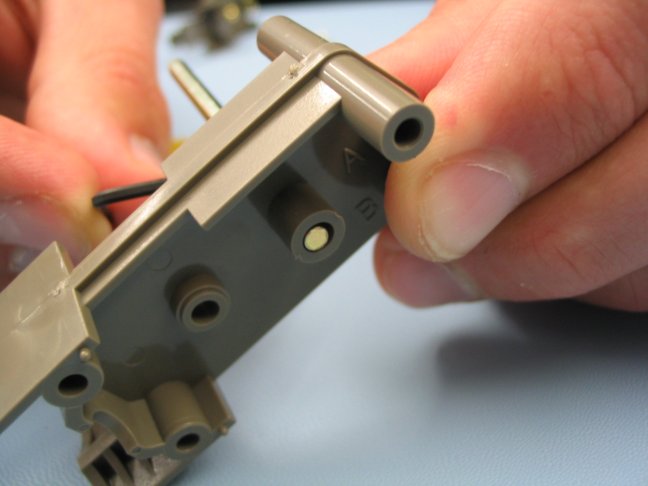
La
seconde étape consiste à bien placer les douilles («busing» en
anglais) dorées dans les pièces de plastique du boîtier.

Il faut
s'assurer d'une bonne lubrification des essieux durant le montage
afin d'obtenir une certaine douceur de roulement du moteur:
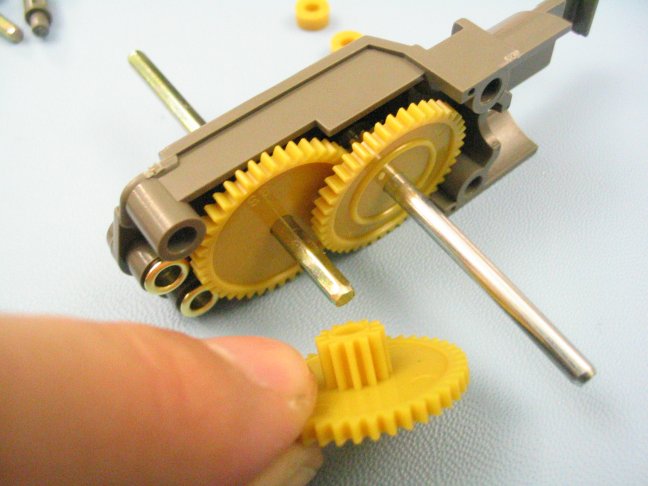
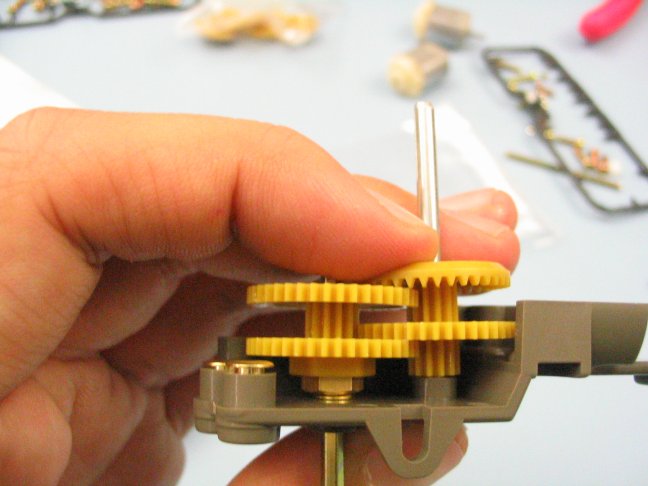
Par la
suite, on place les roues dentées jaunes et les essieux dans le bon
ordre:
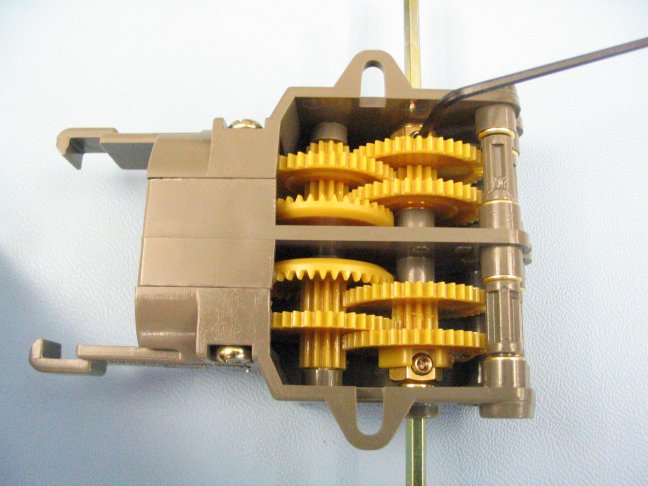
Enfin,
l'expérience a montré que les petites vis devant être serrées
avec la clef hexagonale (de type «Allen») qui est fournie avec
l'ensemble ont une tendance au relâchement. La conséquence est une
perte de roue lorsque le robot est en fonction. Il faut surtout
ajouter une perte de temps importante pour arriver à resserrer les
vis par la suite puisqu'il faut démonter la moitié du robot pour
simplement les atteindre avec la clef... On veillera donc à les
serrer très fermement une fois l'ensemble monté.
Tout
comme avec pour le montage des roulettes de type bille, il vous
restera des pièces (surtout des vis) qui ne seront pas utilisées
pour le reste du montage. Il est même préférable de tout
simplement les jeter.
Les
roues motrices
Les
roues motrices sont aussi fournies par la compagnie Tamiya («Sports
Tires Set (56mm DIA)) et se trouvent aussi dans la boîte fournie
avec le reste du robot. Montez la paire de roues en suivant les
instructions incluses. On optera pour la configuration «For hex
shaft output (For Educational Construction Series)» puisque le
moteur vient avec des essieux ayant une section hexagonale. Ici,
nous avons choisi de monter les roues en plaçant le support d'essieu
dans la partie profonde de la roue et les têtes de vis du côté peu
profond. Ce choix est l'inverse de ce que le montage de la compagnie
recommande. Peu importe la façon de faire, il n'y aura aucun impact
sur la suite des choses.

















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}