Capteurs
infrarouges
Les
DEL et les phototransistors opérant dans l'infrarouge sont très
économiques pour détecter des objets à courte distance sans
nécessiter de contact. Avec certaines techniques, on parvient même
à détecter de plus grandes distances. Les capteurs infrarouges se
retrouvent donc partout en automatisation et en robotique.
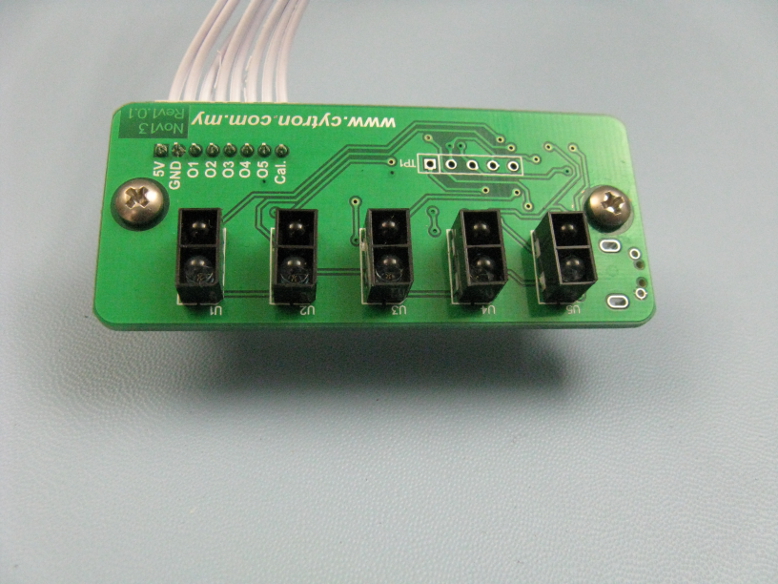
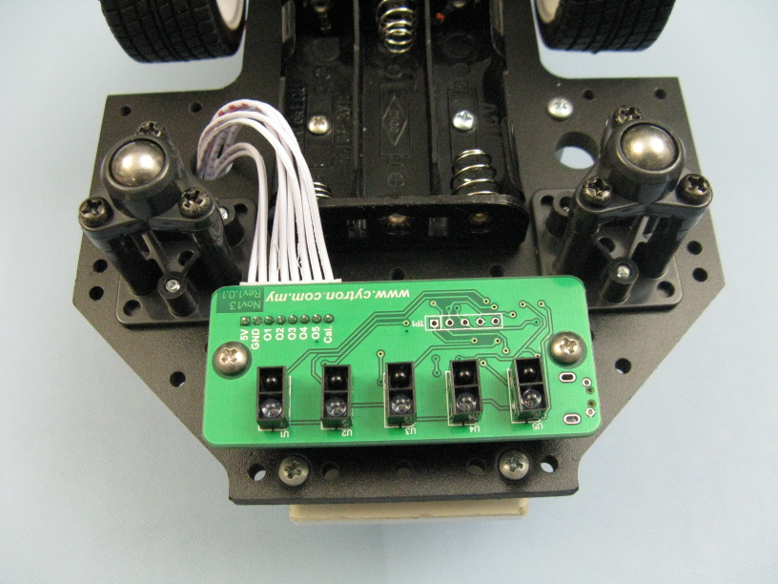
Le
suiveur de ligne Cytron LSS05
Le
suiveur de
ligne
Cytron
LSS05
demande
des trous espacés de 55 mm
pour le montage. Le suiveur de ligne se monte à l'avant avec une
tige d'espacement de 3/4
de pouce
permettant de le fixer à la base de PVC du
robot.
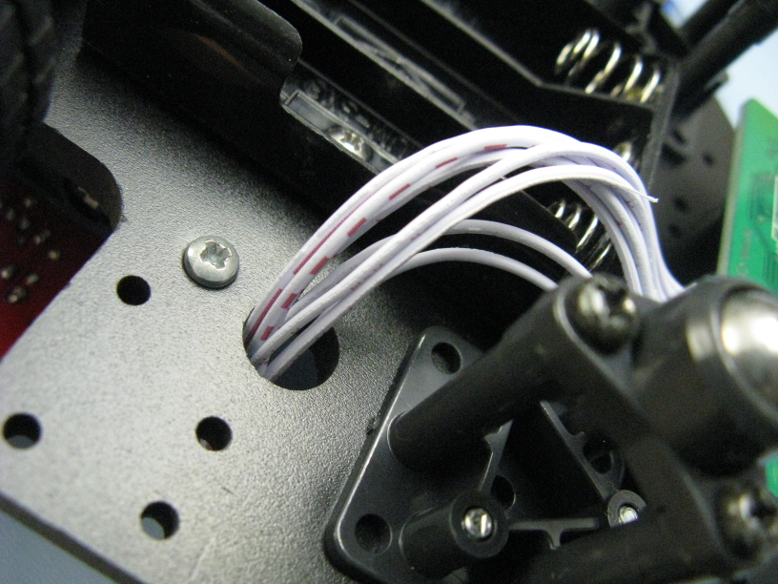
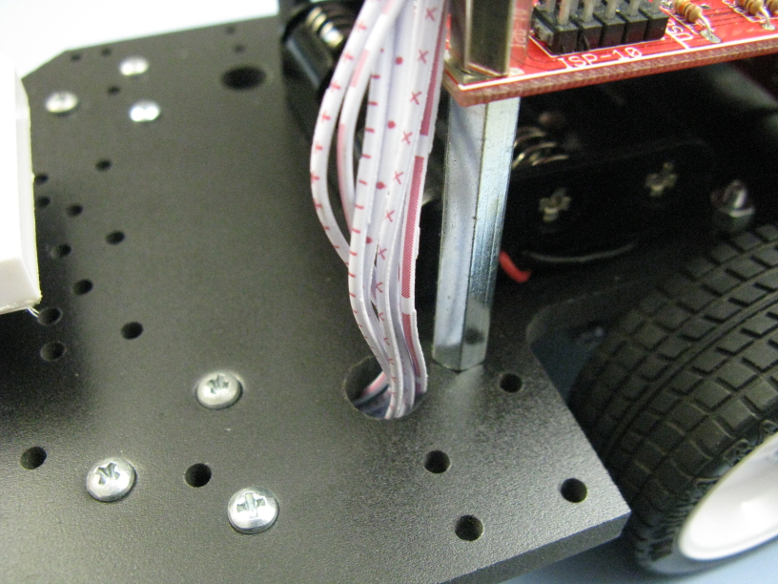
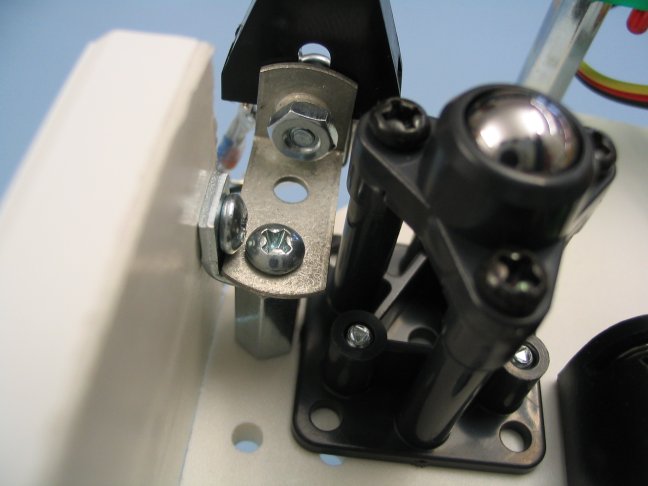
QRB1114
Le
QRB1114 de Fairchild est un photo-réflecteur qui permet de
distinguer les surfaces noires et blanches. Il peut être installé
sur le robot à peu près n'importe où puisqu'une seule vis sur la
base de PVC est nécessaire pour le maintenir. L'autre vis permet
d'ajuster la hauteur du QBR1114 par rapport au sol. Un dégagement
d'environ 5mm fait généralement l'affaire, mais une calibration
sera nécessaire pour assurer son bon fonctionnement. Les fils rouge
et noir sont pour l'alimentation alors que le bleu transmet le signal
utile.
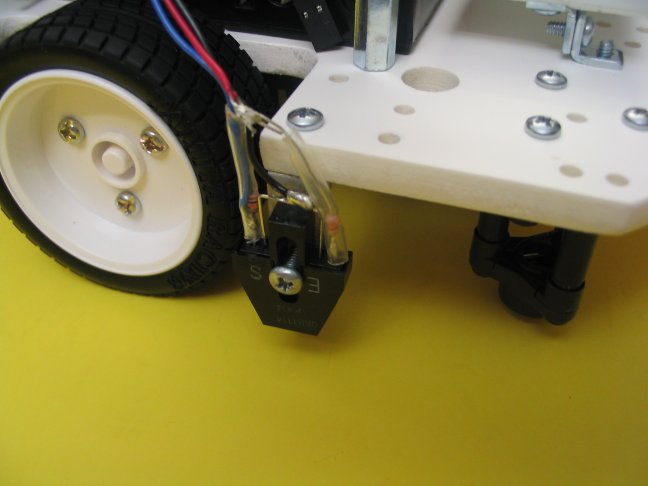
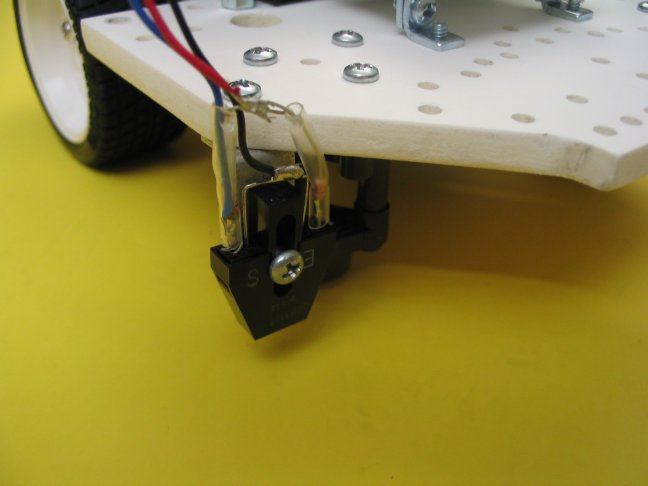
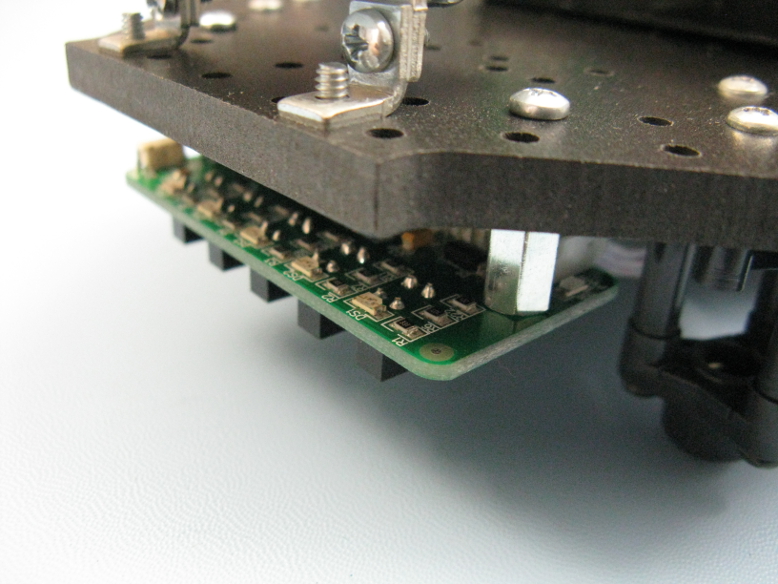
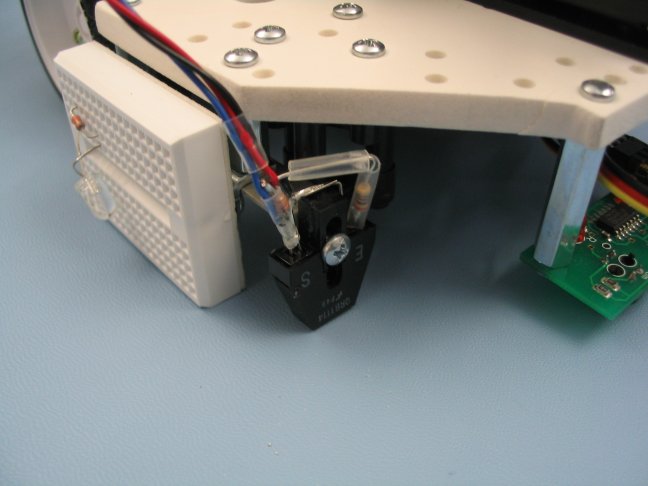
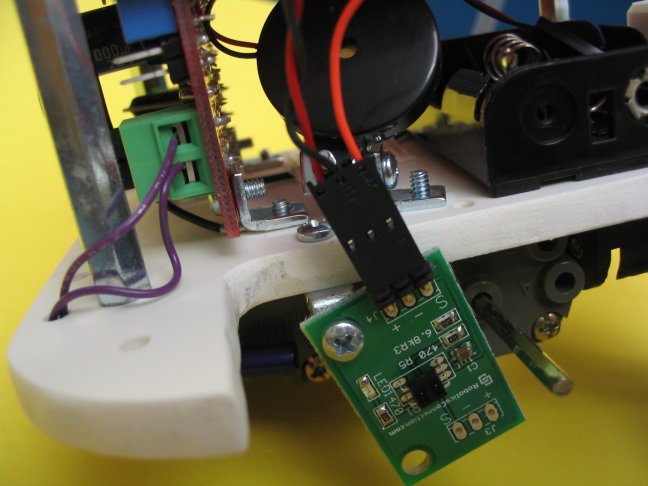
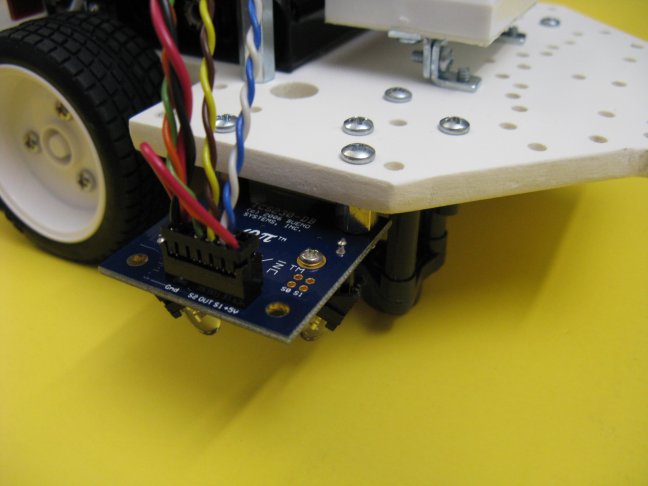
Il est
souvent utile d'avoir un breadboard sur le côté du robot.
On peut profiter de cette situation pour monter les QRB1114 juste
sous l'angle métallique qui retient le breadboard comme le
montrent les photographies suivantes. Cette façon de monter le
capteur permet de libérer un trou sur la base de PVC pour un autre
capteur tout en permettant au QRB1114 d'être inséré dans un
endroit du robot qui peut devenir particulièrement congestionné
quand plusieurs composantes sont montées à l'avant.
Encodeurs
de positions montés sur les roues
Les
signaux PWM envoyés au pont en H permettent de moduler la vitesse
des moteurs et rendent ainsi possible un certain contrôle sur les
déplacements du robot. Par contre, plusieurs facteurs (inclinaison
de la surface, efficacité relative des moteurs, forces de friction
variables, et autres) rendent ce contrôle encore imprécis. Des
encodeurs de positions montés sur les roues offrent la possibilité
de compter le nombre de révolutions effectuées. De cette façon,
il devient facile de savoir où en sont rendues les roues quand on
désire leur faire suivre une trajectoire particulière.
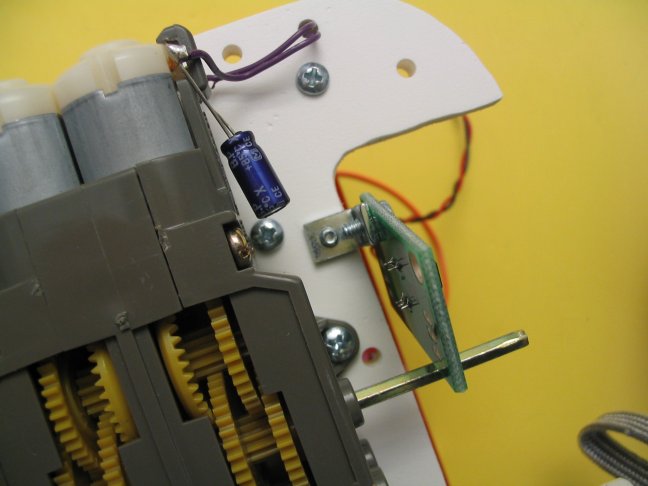
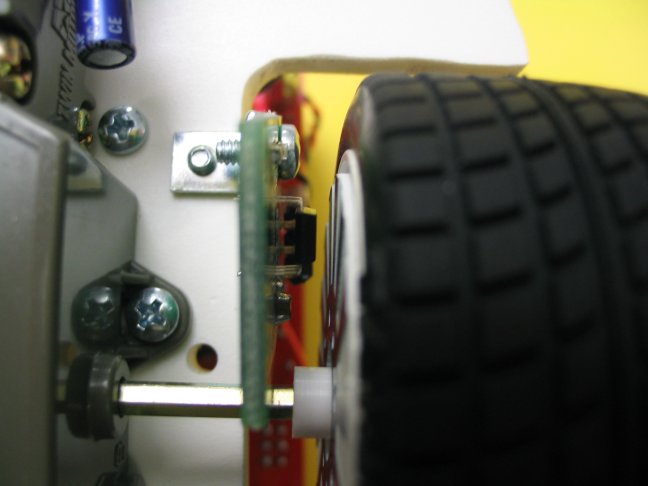
Les
encodeurs RoboticsConnections.com conviennent très bien au type de
roues utilisées sur le robot. Pour les installer, il faut retirer
les deux roues arrière du robot pour les remplacées par deux autres
identiques, mais pourvues de disques avec des rayons noirs et blancs
collés à l'intérieur de la roue. Pendant que les roues sont
retirées, il y a plus d'espace pour insérer les détecteurs dans
des trous prévus à cette fin tout près du pont en H. Ces
détecteurs sont légèrement différents pour le côté gauche
(identifié «G») et pour le côté droit (identifié «D»). Ils
sont constitués d'un petit circuit sur lequel prend place un couple
DEL infrarouge et phototransistor. De chaque côté, le disque avec
des rayons noirs et blancs doit venir se placer le plus près
possible du circuit, sans toutefois qu'il y ait contact. De cette
façon, les zones noires et blanches peuvent défiler devant le
mécanisme de détection infrarouge.

Détecteur
de couleurs
La
compagnie TAOS offre des capteurs capables de détecter la couleur
d'une surface. Le capteur a des trous de montage espacés de un
pouce ce qui facilite le montage sur le robot, à l'avant, à 45º ou
directement à l'avant.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}