Le
simulateur SimulIDE et un peu plus...
Le
manque d’accès à un montage physique comme une carte mère à
microcontrôleur ou simplement le besoin d’accéder à un
environnement de débogage avancé justifient souvent la nécessité
de se tourner vers la simulation. Pour la série des
microcontrôleurs Atmel/Microchip AVR, les possibilités sont
nombreuses et intéressantes sous Linux.
SimulIDE
Un
microcontrôleur est toujours utilisé dans un système réel où des
périphériques externes lui sont branchés. Il existe une solution
avec une interface graphique permettent l’ajout de composantes de
périphériques et de plus facilement suivre le déroulement de la
simulation. SimulIDE
est probablement la meilleure option pour parvenir à simuler un
système plus complet et de façon flexible. SimulIDE a une très
grande collection de composantes qui permet de construire des
systèmes élaborés. Ce sera donc l’option privilégiée.
SimulIDE possède une interface Qt qui peut être instable parfois
(lire erreur de segmentation…), mais les résultats de simulation
sont corrects puisque SimAVR
est utilisé comme moteur de simulation en arrière-plan sans qu’on
s’en aperçoive.
À
noter qu’un simulateur avec un nom presque semblable, Simultron,
existe également et ressemble à SimulIDE dans son fonctionnement.
Il est cependant un peu moins récent et offre beaucoup moins de
composantes pouvant être ajoutées. On évitera de l’utiliser,
mais il ne faut pas confondre les deux options cependant.
Utilisation
de SimulIDE
Après
avoir les
outils logiciels, on peut démarrer le simulateur:
%
/home/<votreCompte>/SimulIDE_0.3.12-SR3/bin/simulide
&
Il
vous faudra donc adapter le chemin à la réalité de l’endroit où
vous avez fait l’extraction lors de l’installation.
Sur
la gauche de
l’interface graphique,
la bibliothèque de pièces est suffisamment garnie pour avoir un
réel intérêt pour une simulation élaborée. On retrouve aussi de
vrais capteurs de distance (section
Micro/Sensors) comme
le HC-SR04. On
peut avoir sa fiche
technique du manufacturier SprakFun
et
comprendre comment il fonctionne.
On
a également des portes logiques.
SimulIDE
reste aussi beaucoup plus près de certaines réalités électriques.
La façon de brancher les DEL et les boutons-poussoirs doit
respecter les bonnes pratiques ce qui est d’un grand intérêt. On
a aussi accès dans la section Meters
à des voltmètres et des oscilloscopes.
Les
programmeurs de SimulIDE ont aussi prévu des rectangles de texte et
des lignes pour permettre de documenter le circuit plus facilement.
Bref, on a des moyens de monter un système intéressant! On
ne peut cependant utiliser qu’un seul processeur dans le système,
mais ce n’est pas une restriction importante.
Le
circuit en exemple à la figure 1
plus
bas
montre
un circuit simple de base avec SimulIDE.
Le code (souvent
appelé firmware
dans
la documentation de SimulIDE)
correspondant
au compteur 32 bits en exemple du travail pratique 1
a été chargé
dans le ATmega324a.
On verra les «sondes»
(probes)
changer de couleur, mais aussi une petite DEL qui est ici en série
avec une petite résistance comme il se doit. Elle change aussi de
couleur (si la résistance n’est pas trop élevée!) ce qui est
conforme au résultat attendu. Noter
aussi le bouton jaune ou rouge au haut de la fenêtre vers le centre
et qui permet de démarrer ou arrêter la simulation en cours.
Le
processeur choisi ici est le atmega324a qui est identique au
atmega324pa sauf pour certaines réalités électriques de très bas
niveau. Mais au niveau logique et de simulation numérique, les deux
sont identiques.
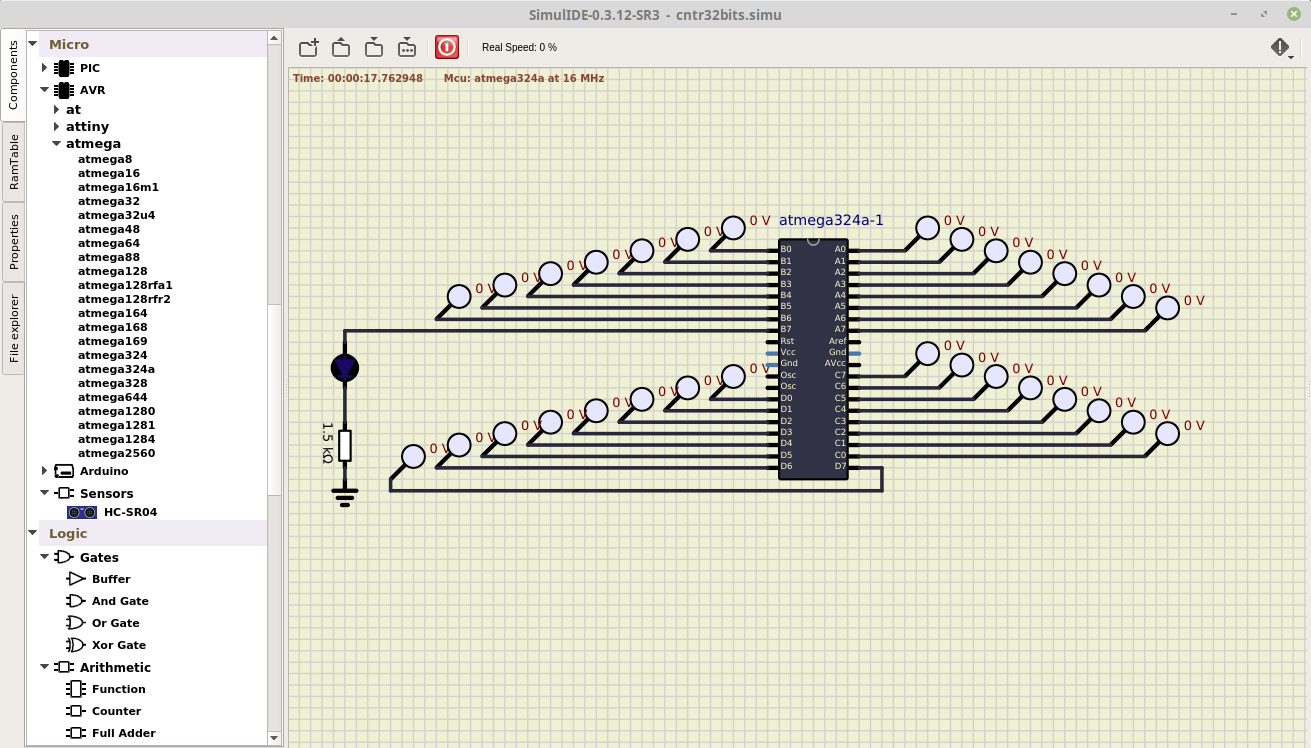
Figure
1:
aperçu de SimulIDE avec un circuit simple
Bien
prendre en note également
qu’il faut cliquer avec
le bouton droit de la souri
sur
le processeur AVR
instancié
pour charger le code à exécuter (load
firmware)
et qu’il faut prendre le fichier exécutable en format
.hex généré par le Makefile du
cours.
Il faut aller dans «properties» du même menu pour changer la
vitesse d’exécution qui est de 16 MHz par défaut et
la placer à 8MHz.
Le
circuit construit avec SimulIDE peut être sauvegardé dans un
fichier dont l’extension est .simu.
Il s’agit d’un fichier ASCII respectant le format XML qu’on
peut donc éditer
ou
au moins regarder pour avoir une idée de ce qu’il contient. À la
rigueur, un tel fichier aurait pu être également un fichier VHDL
(comme
en INF1500) puisqu’il
s’agit d’une liste de pièces interconnectées (netlist)
correspondant
au matériel.
Les
icônes à gauche du bouton d’arrêt/démarrage de la simulation
permettent de gérer le fichier de circuit (ouvrir, sauvegarder,
etc.)
Le
code, quant à lui, est celui des AVR sans
modifications et marcherait avec la vraie puce physique directement.
Pour
les autres aspects de l’utilisation de SimulIDE, on trouve beaucoup
de vidéos sur youTube
à commencer par celle-ci
https://www.youtube.com/watch?v=k6Eu72MWyyQ.
Toutefois,
on
peut arriver à maîtriser l’outil assez rapidement par la
pratique, tout simplement. Aussi, le simulateur vient avec un
éditeur de code intégré, mais il est préférable de manipuler son
code avec l’éditeur
VS-Code à l’extérieur et de seulement charger l’exécutable
dans le ATMega324a pour la simulation.
Autres
options plus
complexes (pas
nécessaires
pour le cours)
L’option
du logiciel SimulAVR
a longtemps été la seule option pour la simulation sous Linux des
microcontrôleurs AVR mais n’est plus réellement maintenue de
façon sérieuse par la communauté. SimAVR
est maintenant le logiciel le plus utilisé. Il faudra donc faire
attention à ne pas confondre les deux malgré des noms très
semblables, car ils sont différents. SimAVR est un simulateur peu
convivial à utiliser et qui doit être complété par d’autres
programmes pour former une solution complète. Par contre, il permet
d’obtenir les signaux au plus bas niveau des opérations du
processeur.
SimAVR
permet de charger un programme déjà compilé pour un modèle d’AVR
précisé et d’en faire l’exécution sous une plate-forme Linux.
Il faudra faire quelques ajustements au code pour aider à la
simulation. De manière spécifique, il faudra ajouter quelques
lignes de code pour générer des signaux dans un fichier texte
généré par le simulateur pour pouvoir les observer avec le
visualisateur GTKWave.
SimAVR s’invoque sur la ligne de commande Linux et n’a pas, à
proprement parlé, d’interface graphique.
Le
fichier texte de type .VCD obtenu en fin de simulation peut devenir
de taille assez importante puisqu’il contient la valeur des signaux
spécifiés pour chaque cycle d’horloge du processeur. Il faudra
en tenir compte et essayer d’utiliser ces traces de signaux de
façon judicieuse et parcimonieuse. GTKWave a une interface dont il
faut savoir quelques petites subtilités pour éviter les surprises
au départ.
En
cours de simulation, l’utilisation du débogueur GDB
est possible, mais il faudra utiliser la variante pour compilation
croisée avr-gdb. Le débogueur avr-gdb se connectera à SimulAVR par
TCP avec un socket Unix local. On pourra donc suivre l’évolution
du programme en ajoutant des points d’arrêt (breakpoints)
et en affichant les valeurs des variables, mais aussi de différents
registres internes du microcontrôleur, ce qui peut être très
utile. GDB possède quelques options pour ce qui est de l’interface
graphique, mais invoquer avr-gdb avec l’option --tui suffit en
général à une utilisation convenable puisque, comme le nom
l’indique, une interface texte plus élaborée sera fournie.
Un
microcontrôleur est toujours utilisé dans un système réel où des
périphériques externes lui sont branchés. Bien entendu, il est
toujours possible de forcer des valeurs (surtout en entrée sur les
registres PINx de l’AVR) pour contourner le problème et bien
simuler l’ensemble. Évidemment, ce travail peut devenir assez
ardu et très long, mais il peut s’avérer nécessaire dans
certaines situations, mais on voudra en général le limité le plus
possible.
Compiler
pour SimAVR et GTKWave (la méthode un peu compliquée...)
SimAVR
accepte du code tel que compilé normalement pour la puce physique
elle-même, tout comme avr-gdb d’ailleurs. Le seul vrai petit
problème arrive lorsqu’on doit obtenir les signaux qui forment une
trace de l’exécution de la simulation et qui devront être
visualisés avec GTKWave une fois la simulation terminée. Il faut
alors, à même le code, préciser dans quel fichier écrire les
résultats de simulation ainsi que la liste des signaux en
observation. Ces directives doivent impérativement se retrouver
dans un code C strict, et non dans un fichier avec du code C++. Les
deux langages, bien qu’ayant une base commune élargie, n’ont pas
exactement les mêmes règles pour certains aspects, surtout pour ce
qui concerne les appels de fonctions. L’ensemble de la démarche
est bien expliquée au point 1 de l’article du Magazine
Linux France Développer sur microcontrôleur sans microcontrôleur:
les émulateurs.
Le
plus simple est donc de regrouper dans un court fichier appelé ici
sepupSim.c les directives pour la génération des signaux de
simulation. Notez que l’extension .c est importante et doit être
préservée pour assurer une compilation en langage C par le
compilateur. Si vous êtes un mordu de ces questions, l’explication
compliquée est disponible. Quelques autres directives autres
que celles montrées ici se trouvent décrite directement dans
/usr/include/simavr/avc/avr_mcu_section.h directement.
Pour aller directement à l’essentiel, on
peut s’en tenir à ce qui suit en acceptant d’y ajouter ou de
retirer ce qui convient comme
signaux désirés en sortie (à noter qu’on peut ajouter des
registres internes du microcontrôleur ce qui peut être très
intéressant) :
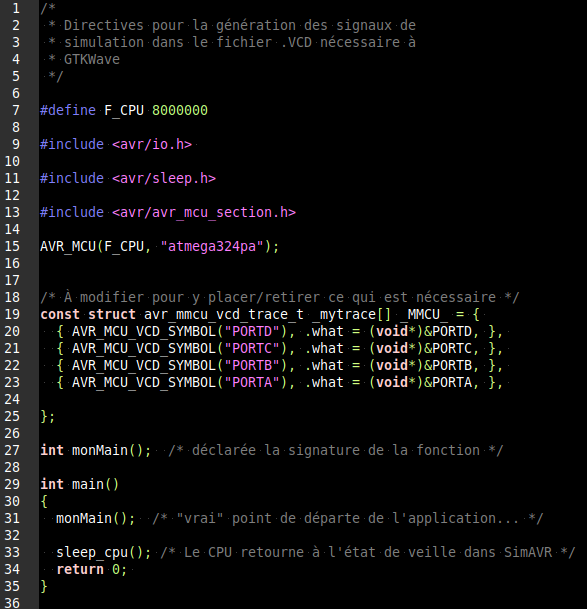
Figure
1: les directives de simulation pour SimAVR et GTKWave
Dans
ce fichier, il y aura une fonction «main» qui aura comme rôle
d’appeler ce qui était jusqu’à maintenant le «main» par une
légère modification. Le code du compteur 32 bits de la semaine
subit donc quelques modifications. Les modifications seront aux
lignes 12 et 14. La ligne 12 précise au compilateur que la fonction
«monMain» devra être appelée avec les normes du langage C
(stricte), donc depuis setupSim.c. La ligne 14 change le nom du
«main» par «monMain» pour terminer le lien d’appel
correctement.
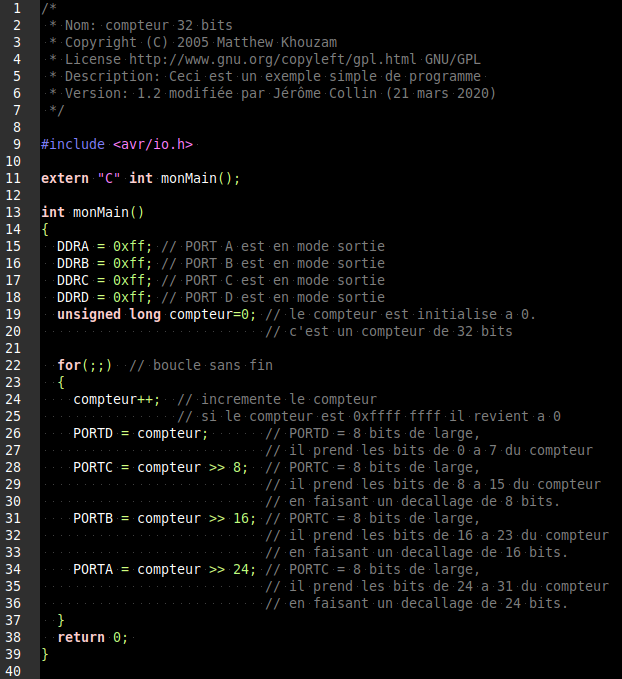
Figure
2: modification au code du compteur 32 bits
Il
faudra faire deux modifications au Makefile pour s’ajuster à cette
réalité:
Ajouter
setupSim.c à la liste de fichier à compiler
Ajouter
un chemin de recherche de fichiers «include» au compilateur pour
qu’il trouve avr_mcu_section.h. Donc, un argument
-I/usr/include/simavr
à ajouter avec les autres déjà présents ou à la variable INC
du Makefile.
Après
avoir recompilé le code de manière habituelle (à noter que la
commande «make install» a complètement perdu de son sens…), on
peut invoquer le simulateur:
%
simavr -f 8000000 -m atmega324a simExemple.elf
On
notera bien entendu les arguments qui spécifient la fréquence
d’horloge et le modèle de processeur. À noter le «a» et on le
«pa» à la fin du modèle. L’un et l’autre ne pouvant être
distingué que par des caractéristiques physiques au niveau
électrique sans que cela ne change la simulation au niveau
numérique.
La
simulation devrait se terminer si le programme se termine. Un
«CTRL-C» au
terminal peut
aussi y mettre fin. Un fichier au
nom de gtkwave_trace.vcd devrait être visible maintenant dans le
répertoire courant. On peut procéder à la visualisation:
%
gtkwave gtkwave_trace.vcd
L’interface
de GTKWave a ceci de surprenant: les signaux n’apparaissent
naturellement dans la portion de droite. Il faut plutôt
double-cliquer sur «logic» à gauche. Cette action affichera la
liste des signaux disponibles un peu plus bas. Il faudra
sélectionner chacun avec la souri puis appuyer sur «Insert» tout
au bas et
toujours à gauche
pour voir le signal sur la portion de droite.
Une fois tous les signaux en place, on
pourra jouer avec les boutons «Zoom In», «Zoom Out» et «Zoom
Fit» (juste sur la droite des deux autres) pour ajuster l’affichage
de façon appropriée. L’emploi du curseur, de l’ascenseur
(scroller)
horizontal et des autres options sont également à considérer.
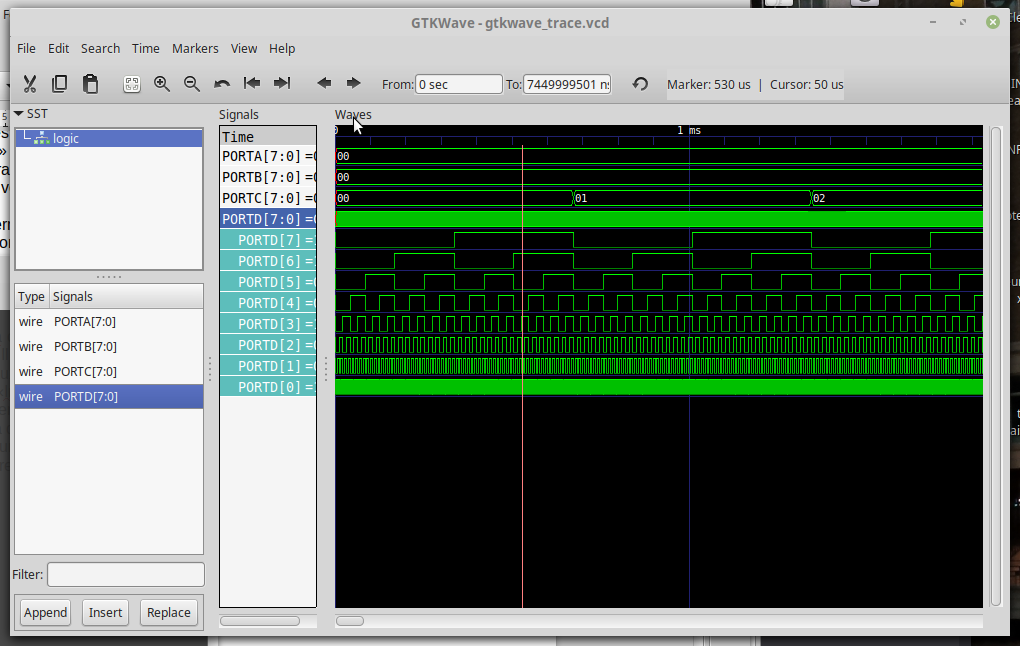
Figure
3: Analyse des signaux avec GTKWave
GDB
L’analyse
des signaux avec GTKWave a ses limites. Premièrement, l’ensemble
des données peut devenir passablement volumineux puisque la
simulation y ajouter constamment de nouvelles valeurs. De plus, on
doit pouvoir préciser des valeurs en entrée à différents moments
pour exercer certaines portions de code. GDB peut aider à contrôler
la simulation de façon plus directe comme
l’explique l’article Debugging
ATtiny85 Code, Part 1: SimAVR and GDB.
Avant
de lancer GDB, il faut que la simulation débute et qu’on rajoute
un argument «-g»
à
SimAVR pour lui préciser que la
simulation sera sous le contrôle du débogueur. Plus précisément,
SimAVR ouvrira alors un port de communication local (unix socket)
pour communiquer avec GDB. Le numéro de ce port est 1234 (hé oui,
très original…)
%
simavr -g
-f
8000000 -m atmega324a simExemple.elf
GDB
peut être
démarré
par la suite dans
un autre terminal.
Donc, selon ce qui vous convient, vous faites l’une des trois
choses suivantes:
%
avr-gdb
–tui
%
ddd --debugger avr-gdb
%
gdbfrontend --gdb-executable=avr-gdb
Peu
importe la manière dont l’arrivée dans avr-gdb
se fera, il faudra taper
les deux commandes
de base suivantes
pour
se connecter au simulateur.
(gdb)
file simExemple.elf
(gdb)
target remote :1234
Un
bon article pour faire
les premiers pas avec GDB et les AVR
reste Debugging
ATtyny85 Code, Part 1: SimAVR and GDB aux sections «Start
simavr» et les suivantes. À note que je n’ai pas eu besoin de la
commande «load» après «file» et «target» tel que mentionné
dans l’article. Par contre, le reste de l’article demeure une
très bonne introduction aux commandes les plus simples de GDB pour
commencer tout en montrant comment travailler dans les situations les
plus habituelles. L’avantage avec avr-gdb est qu’on est capable
de forcer des valeurs, tout particulièrement sur les PINx en entrée
du microcontrôleur et on peut ainsi simuler des actions réelles,
comme l’appui sur un bouton-poussoir par exemple, et de voir le
résultat dans l’exécution du code. On peut donc utiliser
une expression comme celle-ci:
(gdb) set
PINB = PINB | 1<<PIN_USB
De
telles commandes, combinées à d'autres
commandes de contrôle de l’exécution permettent d’arriver à
simuler complètement le déroulement d’un code pour AVR.
Bien
entendu, en arrière-plan, SimAVR continue d’exécuter les
instructions et peut continuer de générer des traces pour GTKWave.
Cette
combinaison peut d’ailleurs aider grandement à la mise au point
d’un programme.
Le
problème de l’utilisation de GDB reste la difficulté à modeler
le comportement réel de périphériques plus complexes dans une
situation plus représentative de l’utilisation d’un système
complet comme un robot. Des simulateurs utilisant SimAVR en
arrière-plan peuvent permettre de contourner ce problème. SimulIDE
en est un et c’est pourquoi son utilisation est privilégiée
plutôt
que la combinaison SimAVR-GTKWave-GDB. Toutefois, si des signaux
précis doivent être analysés, la combinaison des trois outils
devra être utilisée.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}