Circuits
électriques de base
Les
circuits électriques sont évidemment du domaine du génie
électrique et ont moins d'intérêt pour l'ingénieur informaticien
ou logiciel. Par contre, il n'est pas nécessaire d'acquérir des
notions très avancées en ce domaine pour avoir à une meilleure
compréhension de certains aspects électriques du fonctionnement du
robot.
Une
explication assez détaillée a été fournie à propos du pont
en H. Par contre, plusieurs petits sous-circuits apparaissent
ici et là sur le robot. En analysant la situation de près, on se
rend compte que la majorité d'entre eux sont, en fait, des variantes
d'un seul circuit de base, le fameux diviseur de tension. Il est
donc essentiel de revoir un peu ce circuit et de montrer comment il
réapparaît sous diverses autres formes.
Le
diviseur de tension
Deux
résistances en série entre +Vcc et la masse. Voilà tout
simplement ce qu'est un diviseur de tension. La tension entre les
deux résistances, Vo, varie selon les valeurs relatives de R1 et R2.
Autrement dit, en choisissant judicieusement les résistances, on
divise la tension en deux parts, égales ou non, entre 0 et 5 volts.
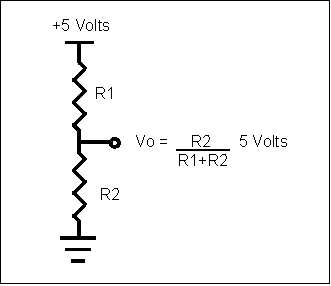
Ici,
+Vcc est fixé à 5 volts, car la carte mère fonctionne à cette
tension tout simplement. Le principe reste applicable à toute autre
tension. La masse pourrait aussi être remplacée par une autre
valeur de tension. En particulier, elle pourrait être négative.
On rencontre d'ailleurs souvent ce cas en électronique en général.
Variation
de R2
Il va de
soit que si l'une ou l'autre des résistances varie, la tension Vo
changera également. Pour faciliter l'analyse, on s'intéressera au
cas où R2 varie, bien que R1 pourrait tout aussi bien être
considérée. Qu'est-ce qui fait que R2 peut varier? Il y a au
moins 3 cas qui nous intéressent avec le robot.
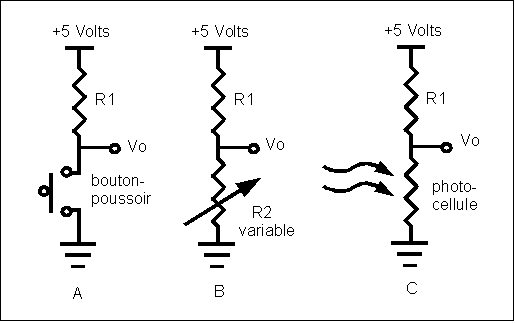
Le
premier est le cas des boutons-poussoirs sur la carte mère. En
effet, un bouton-poussoir a une résistance quasi nulle lorsqu'il est
enfoncé et infinie lorsqu'il est relâché. En conséquence, Vo
prend respectivement les valeurs 0 et 5 volts dans ces deux
situations (circuit A sur la figure).
Par
ailleurs, le potentiomètre de la carte peut être ajusté à l'aide
d'un tournevis. Sa résistance varie alors entre 0 et 10K. On a
donc une variation de Vo qui peut aller de 0 à 2.5 volts si R1 est
de 10K. Le symbole d'une résistance variable comme un potentiomètre
est celui d'une flèche superposée à une résistance pour signifier
la possibilité d'ajustement (circuit B sur la figure). Sur la carte
mère, on souhaite plutôt que Vo varie entre 2.5 et 5 volts. Donc,
le potentiomètre est plutôt en position R1 et la résistance fixe
est R2.
Un
troisième cas d'intérêt est la cellule photoélectrique
(photocellule ou photorésistance) qui, tout comme le potentiomètre,
est une forme de résistance variable. Sa particularité est que sa
résistivité varie en fonction de l'intensité lumineuse. On
symbolise souvent cette composante en plaçant des flèches ondulées
près du symbole de résistance ce qui signifie que la lumière
modifie son comportement (circuit C sur la figure). D'un point de
vue électrique, Vo varie de la même façon que pour le cas
précédent avec le potentiomètre sauf que la photorésistance varie
entre 4 à 11 K environ.
De façon
plus générale, on se rend compte que la variation de R2 permet de
faire fluctuer ou d'ajuster la tension Vo. Cette façon de procéder
est très rentable puisque la tension électrique est un phénomène
physique très facile à mesurer. Cette remarque prend tout son sens
lorsqu'on a accès à un convertisseur analogique/numérique. Si en
plus ce convertisseur est utilisé avec un microprocesseur, on peut
même effectuer une lecture en temps réel des fluctuations de
tension Vo et facilement prendre des actions en fonctions des valeurs
d'entrée. Le ATmega324PA de la carte mère réunit ces deux
éléments en une seule puce pour moins de $5.00.
Un
dispositif capable d'évaluer une variation d'un phénomène physique
et de le traduire en un autre phénomène mesurable se nomme un
transducteur. Ici, la variation de résistivité est convertie en
grandeur de tension par le diviseur de tension. La dilatation du
mercure dans un cylindre gradué pour évaluer la température est un
autre exemple. Il s'agit d'un concept important de la science de la
mesure, la métrologie.
Dans le cadre du cours, il faudra garder ce principe en tête
puisqu'il est à la base de tous les capteurs
qui seront utilisés sur le robot.
Limitation
de courant
Dans les
cas précédents, R2 varie alors que R1 est une constante. R1 n'est
pas inutile pour autant puisqu'elle sert à limiter le courant
consommé et même d'éviter un court-circuit (comme lorsque le
bouton-poussoir est enfoncé). Ce rôle de limitation peut ressortir
dans certains circuits, au point de devenir majeur. Il arrive même
qu'on ne s'intéresse même plus directement à la valeur de Vo tant
qu'on sait que le courant ne dépassera pas une certaine valeur.
C'est ce qui se produit dans deux situations notoires sur le robot.
La
première est pour limiter le courant qui circule dans une diode.
Traditionnellement, la tension aux bornes des diodes était de
l'ordre de 0.7 volt. Aujourd'hui, avec la variété des diodes sur
le marché, il n'est pas rare que cette tension atteigne jusqu'à 2
volts. Par contre, la tension d'alimentation de la carte est
toujours de 5 volts. La résistance R1 permet de combler la
différence de potentiel tout en limitant le courant. Ainsi, plus R1
est faible, 330 ohms par exemple, plus une diode électroluminescente
(del) sera lumineuse. Par contre, avec R1 très élevée, il sera
même difficile de constater que la del est allumée tellement la
luminosité est faible. Une valeur de 1.5K permet une intensité
lumineuse acceptable sans trop consommer de puissance pour le cas de
la carte mère.
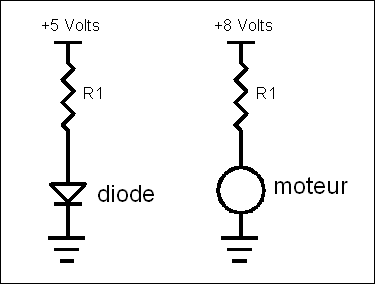
L'autre
cas où R1 joue un rôle de limitation de courant est pour
l'application de tension aux bornes des moteurs. Il faut savoir
qu'un moteur à courant continu qui démarre consomme énormément de
courant et se comporte comme une résistance très faible. Cette
situation se produit également lorsqu'une roue est bloquée (lorsque
le robot est bloqué contre un mur par exemple). Comme on veut
éviter cette trop grande consommation de courant, on place des
résistances de puissance sur le pont en H qui sont en série avec
les moteurs. Le prix à payer pour cet aspect sécuritaire est un
moteur sous-alimenté et qui ne tire qu'une partie de la tension
disponible de 8 volts des piles AA (en fait, entre 6.8 et 9 volts ou
à peu près).
Les
transistors
Un
premier contact avec les transistors et souvent intimidant. On
aperçoit des symboles un peu curieux et l'on a peine à imaginer ce
qui se produit, tant au niveau électrique qu'au niveau logique.
Pourtant, il est possible de partir du diviseur de tension pour
comprendre un peu mieux leur fonctionnement. Il y a plusieurs types
de transistors. Par contre, on peut dire qu'on les utilise pour deux
fonctions précises de base.
La
première consiste à tirer avantage d'un intervalle de
fonctionnement linéaire pour les utiliser comme amplificateur.
Ainsi, avec un signal analogique qui varie de 0 à 10 mV, on peut
arriver à reproduire la même forme de signal, mais variant entre 0
et 200 mV par exemple. Pour des raisons de limitation de bruit et de
précision dans la valeur des paramètres des composants d'un système
d'amplification, la situation devient rapidement complexe.
Concrètement, il faut un circuit constitué de plusieurs transistors
et résistances pour produire l'effet désiré tout en atténuant les
effets nuisibles. Comme l'électronique analogue fait moins partie
de notre domaine d'étude, on s'intéressera moins à ce type de
transistor.
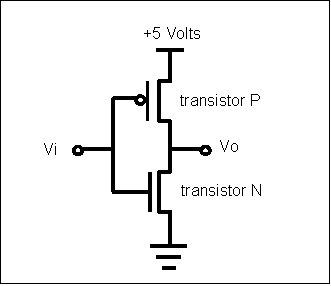
Lorsqu'un
transistor sort de sa région linéaire de fonctionnement, il devient
soit saturé ou soit bloqué. Plus simplement, le transistor se
comporte alors comme un interrupteur, tout simplement. Si un
transistor a un voltage de 5 volts en entrée Vi, et s'il est de type
P, il se comportera comme un circuit ouvert. Dans le cas inverse, si
la tension d'entrée est nulle, le transistor se comporte comme une
résistance presque nulle. Pour un transistor dit de type N, le
comportement est inversé. Les termes P et N viennent de «positif»
et «négatif» et ont surtout à voir avec la nature des matériaux
utilisés pour les fabriquer. Utiliser les transistors comme s'ils
étaient des interrupteurs est à la base du fonctionnement des
portes logiques des systèmes numériques.
Comme on
l'a vu plus haut, on a toujours avantage à limiter le courant qui
traverse un interrupteur d'où l'utilisation du diviseur de tension.
Ici, même avec des transistors utilisés comme interrupteurs, cette
remarque reste vraie. En réalité, on a même avantage à remplacer
les deux résistances R1 et R2 d'un diviseur de tension par deux
transistors, un de type N et un de type P. De cette façon, un des
deux est en circuit ouvert alors que l'autre agit comme en circuit
fermé (court-circuit) et ce, en tout temps, quelle que soit la
tension d'entrée Vi de 0 ou 5 volts. On obtient alors un circuit
très connu appelé l'inverseur logique (figure plus bas). Cette
façon d'utiliser les transistors P et N en paire est généralisable
aux autres portes logiques (ou, et, ou-exclusif, etc.) D'ailleurs,
le terme CMOS
vient de «Complementaty Metal Oxyde Semi-conductor». L'aspect
complémentaire vient de l'utilisation systématique de deux
transistors complémentaires. Le terme MOS réfère au type de
matériaux utilisés pour les réaliser.
On voit
donc que le diviseur de tension est à la base de nombreux circuits.
On pourrait même reprendre le circuit du pont en H et montrer qu'il
est, en réalité, un diviseur de tension double, tout simplement!
En fait, la sortie Vo de chaque diviseur de tension peut être
connectée directement aux bornes d'un moteur. En s'assurant que le
Vo d'un côté est à 0 volt alors que l'autre est à la tension
maximale, le moteur se mettra en marche.
Breadboard
Comme on
le voit, un circuit n'a pas besoin d'être très complexe avant de
devenir fort utile. C'est pourquoi on désire souvent former
rapidement un circuit avec quelques composants. Une façon d'y
arriver est d'utiliser un breadboard. Le terme français de
«montage expérimental» ne correspond pas très bien à la réalité
de ce que l'on veut décrire ici, même s'il s'agit de la traduction
officielle pour un breadboard. On veut surtout distinguer le
breadboard du concept de circuits imprimés génériques qui suivra.

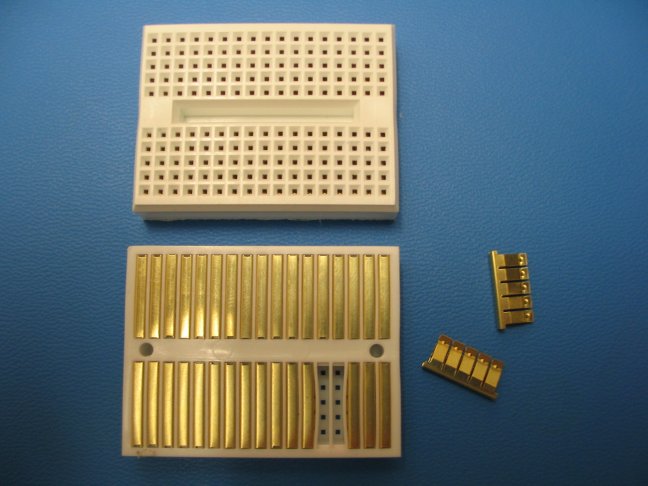
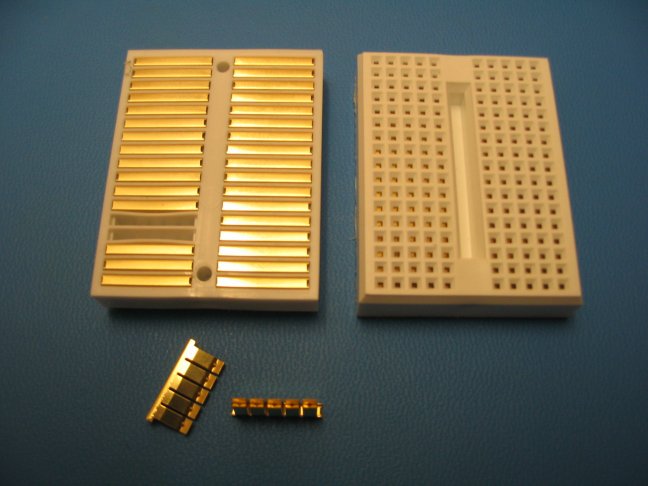
Un
breadboard est constitué de plusieurs trous sur le dessus
pour permettre d'insérer les broches des composants. Sous ces
trous, des languettes métalliques jouent un double rôle. Elles
agissent d'abord comme des pinces qui retiennent fermement les
broches des composants. En plus, ces languettes permettre de
connecter électriquement les broches des composants. La disposition
des languettes peut varier suivant le type de breadboard. Par
contre, la plupart des modèles de breadboard ont une section
plastifiée en leur milieu sur le sens de la longueur. Cette
section, dans le cas du modèle qu'on utilise sur le robot, comporte
en plus deux trous qu'on utilise pour le montage avec des vis 4-40.
Cette section sépare deux rangées de languettes dorées. Chaque
languette relie les trous sur le sens de la largeur.
Les
breadboard sont moins utilisés qu'à une certaine époque,
tout simplement parce que les circuits modernes deviennent très
complexes et beaucoup plus gros. De plus, la technologie des
circuits imprimés s'est beaucoup développée au cours des dernières
années en tant que méthode alternative. Pour toutes ces raisons,
le breadboard employé sur le robot coûte assez cher
comparativement aux autres pièces sur le robot. La raison vient de
la faible demande pour un tel produit sur le marché. Par contre, il
nous permet toujours de monter et de démonter de nombreux circuits
très rapidement.
Circuits
imprimés génériques
L'utilisation
d'un breadboard amène certains problèmes. D'abord, des
pièces peuvent s'en détacher facilement, surtout si le breadboard a
de l'âge et qu'il y a eu usure des languettes. De plus, on ne peut
pas utiliser des signaux à haute fréquence, car le breadboard
amène nécessairement des effets parasites dans un tel cas. Enfin,
on vient de le voir, son coût est important et on peut utiliser la
technologie des circuits imprimés dans bien des cas.
Passer
au développement de circuits imprimés devient également
souhaitable si on désire conserver le circuit assemblé pour une
longue période de temps après avoir testé sommairement le
comportement sur un breadboard. Le développement d'un
circuit imprimé demande certaines connaissances spécialisées et
dépend du circuit désiré. Il existe cependant un compromis
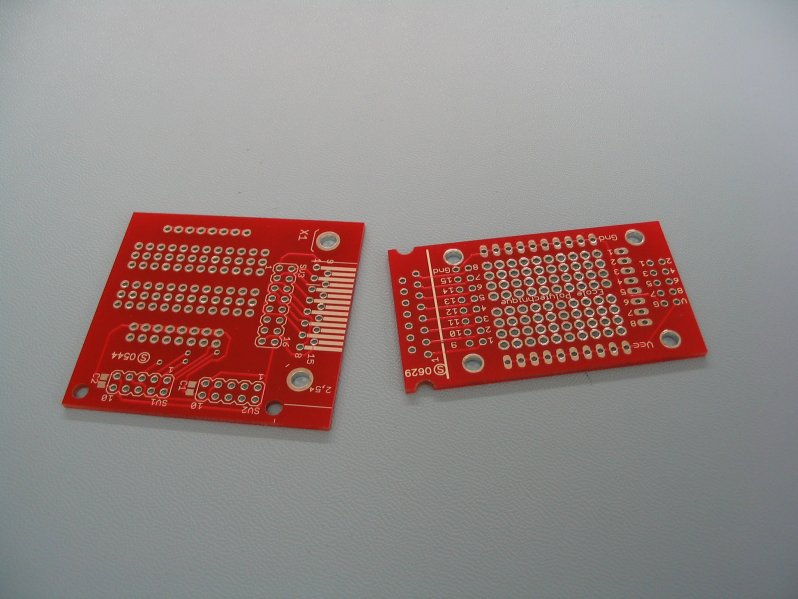
possible avec l'utilisation de circuits imprimés génériques. Il
s'agit en fait de circuits imprimés qui permettent le même genre de
connexions que sur un breadboard comme le montre la
photographie. On peut utiliser ces circuits imprimés comme
substitution au breadboard. De plus, ils sont faciles à
trouver et relativement économiques.
Enfin,
on peut adapter le pourtour de ces circuits imprimés pour que des
connecteurs spécifiques ou des trous de montage se retrouvent aux
bons endroits.
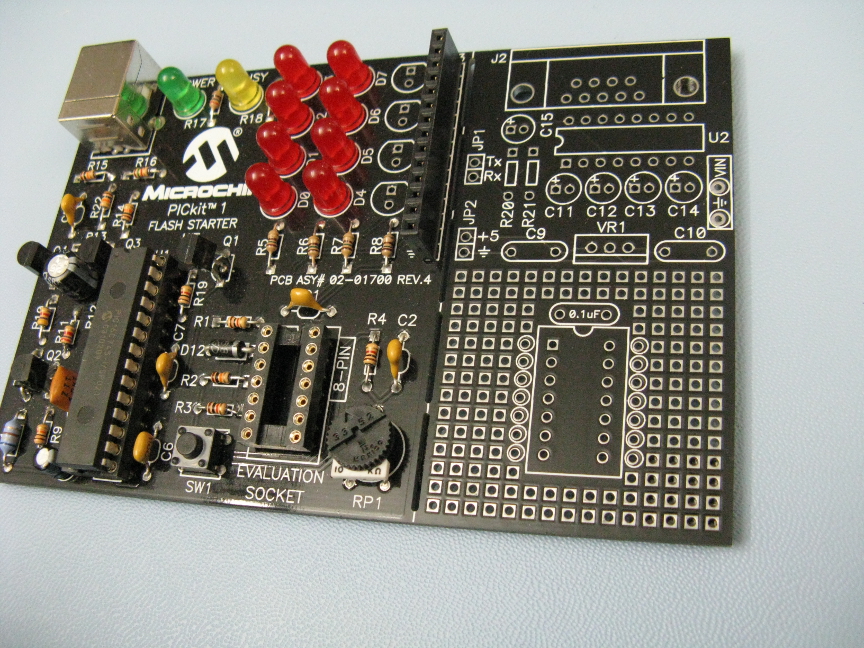
On en
retrouve même intégrés à des cartes à microcontroleur parfois
comme on peut le voir sur cette dernière photographie.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}