Autres
capteurs
Certains
autres capteurs se placent sur le robot sans support ou sans
dispositions complexes.
Accéléromètres
Comme
son nom l'indique, un accéléromètre mesure l'accélération d'un
objet, y compris l'accélération gravitationnelle. Ces capteurs
peuvent détecter les accélérations dans deux directions
perpendiculaires. Il faut donc placer le capteur bien à plat sur la
base du robot. Par contre, n'importe quel endroit fera l'affaire,
sur le dessus ou en dessous. En général, il est préférable de
placer les autres capteurs sur le robot et de terminer par le
placement de l'accéléromètre, là où il reste de l'espace. Celui
de la compagnie Sparkfun
peut même être positionné sous le robot, près du réceptacle à
piles.
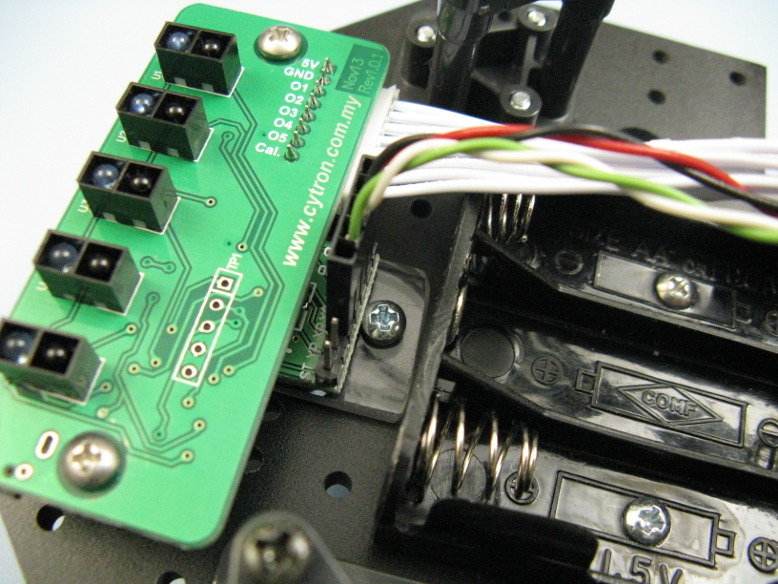
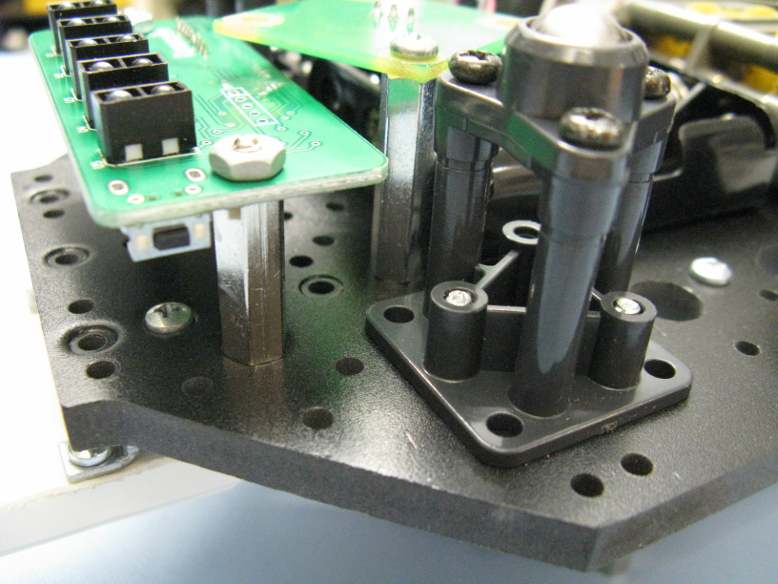
Afficheur
à cristaux liquides
Les
afficheurs à cristaux liquides (Liquid Crystal
Display – LCD) sont très économiques. On y a
recours pour afficher de courtes chaînes de caractères. Celui
utilisé ici ne se monte qu'à un seul endroit sur le robot, soit au
bas de la carte mère, par-dessus les tiges de 0.75 pouce déjà en
place. Deux tiges de 0.5 pouce se visent dans celles de 0.75 pouce
(il faudra d'abord retirer les deux écrous qui retiennent les tiges
de 0.5 pouce sous l'angle en aluminium qui sert de support à
l'ensemble). À cette position, le LCD ne nuira à aucun autre
capteur ni à la programmation de la carte et sera toujours bien
visible.

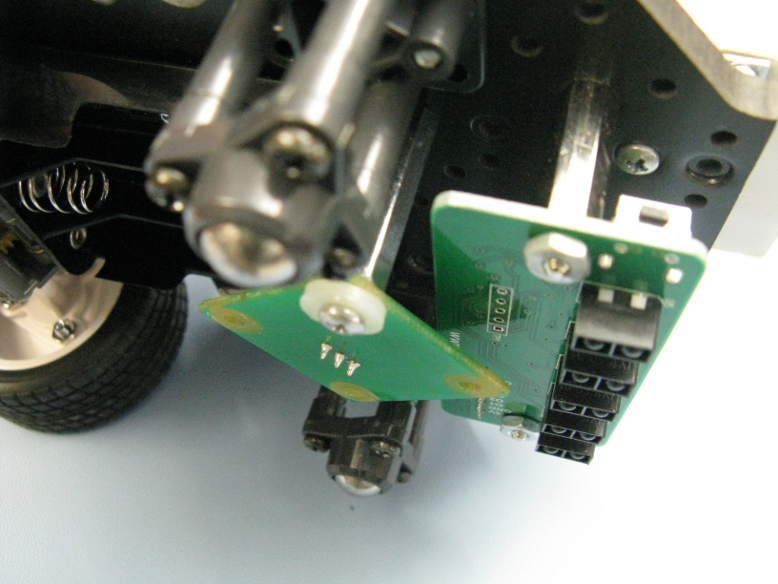
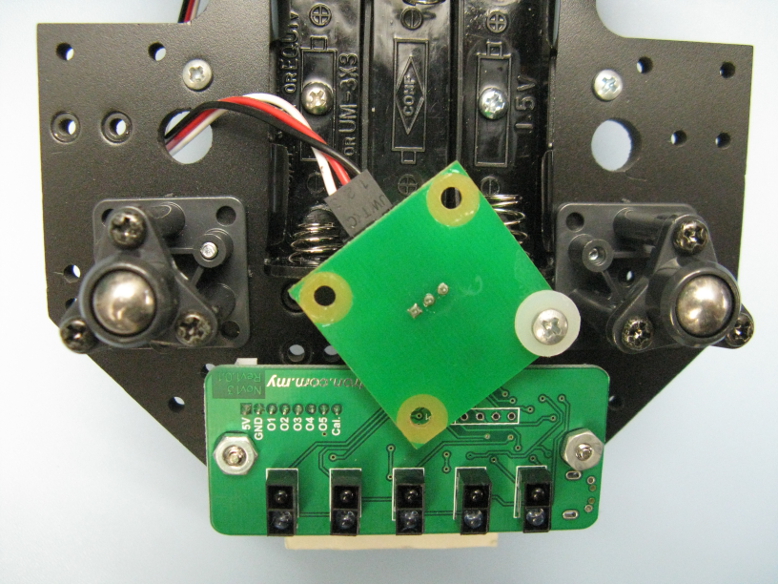
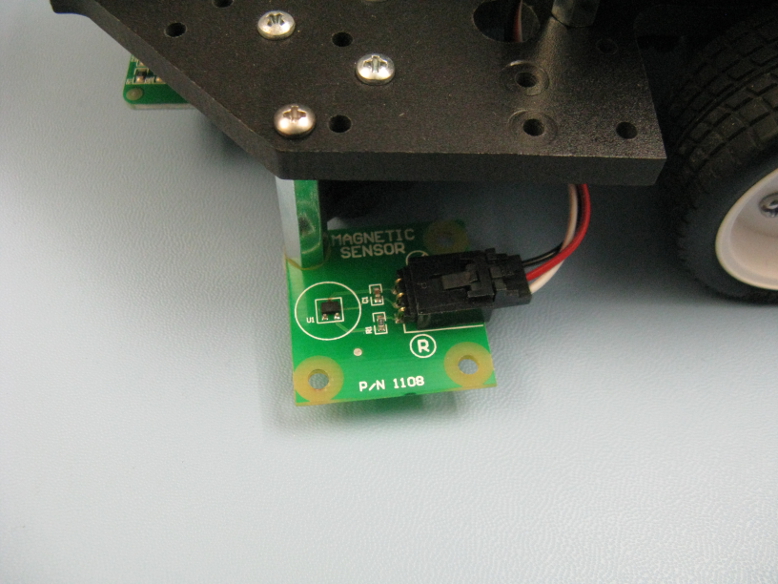
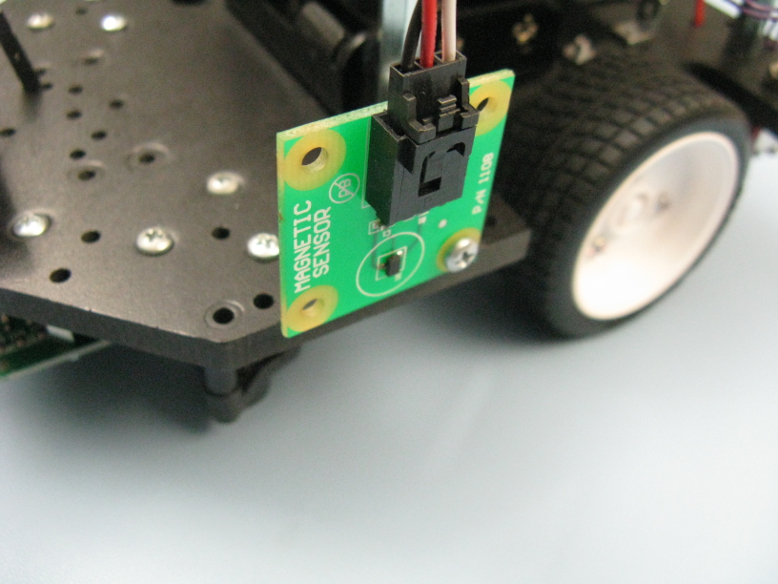
Détecteur
de champs magnétiques
On
peut placer ce capteur très près du sol, à l'avant, tout juste
devant ou derrière le suiveur de ligne. Les champs magnétiques
décroissent rapidement d'intensité dès qu'on s'en éloigne quelque
peu. On verra donc à placer le capteur le plus près possible de la
source du champ magnétique. L'expérience semble montrer que les
moteurs n'émettent à peu près pas de champs magnétiques. Il faut
remarquer que leur extérieur est en métal ce qui explique
probablement ce comportement. Il n'y a donc pas de raison de se
priver de placer le capteur à l'arrière du robot, si nécessaire.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}