Servomoteurs
et régulateur de tension
Les
servomoteurs (rubrique
sur Wikipédia) sont très utilisés en robotique, car ils sont à
la base de nombreux mécanisme d'actionneurs, comme des pinces par
exemple. Par contre, ils consomment souvent beaucoup de courant et
demandent une tension souvent très bien régulée ce qui nécessite
des dispositions particulières.
Servomoteurs
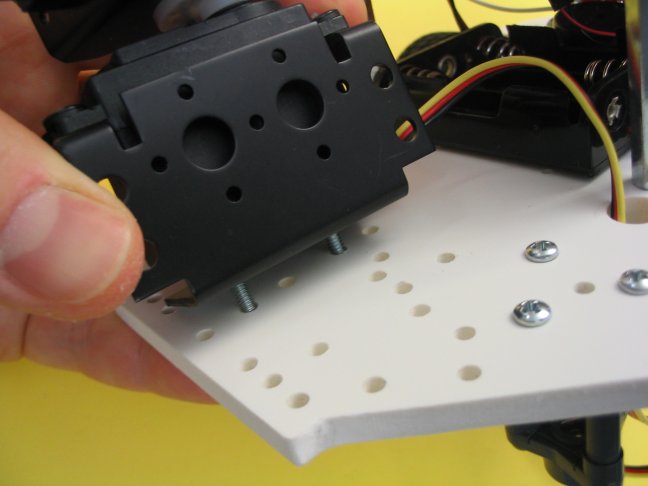
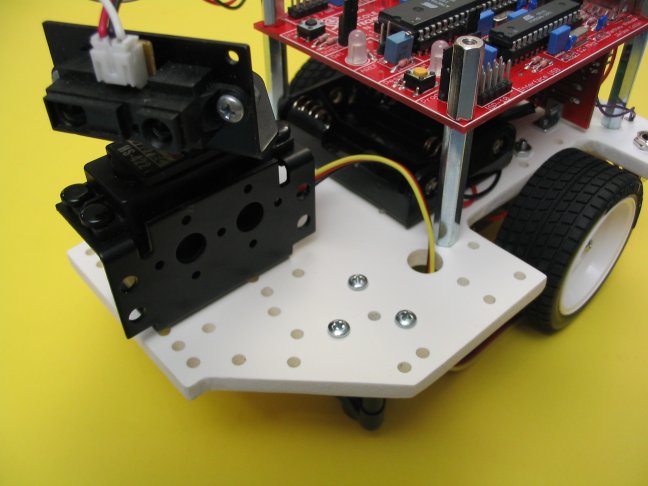
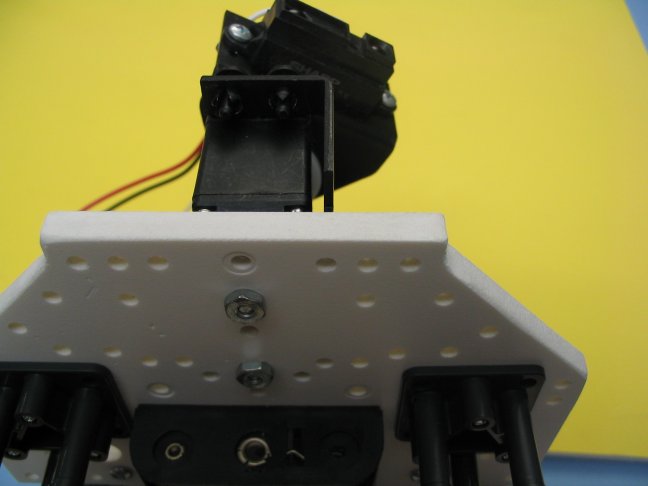
Des
servomoteurs peuvent être fixés sur la base du robot à l'aide de
support
Lynxmotion. Les capteurs peuvent alors balayer l'horizon et
augmenter ainsi leur zone de couverture.
Source
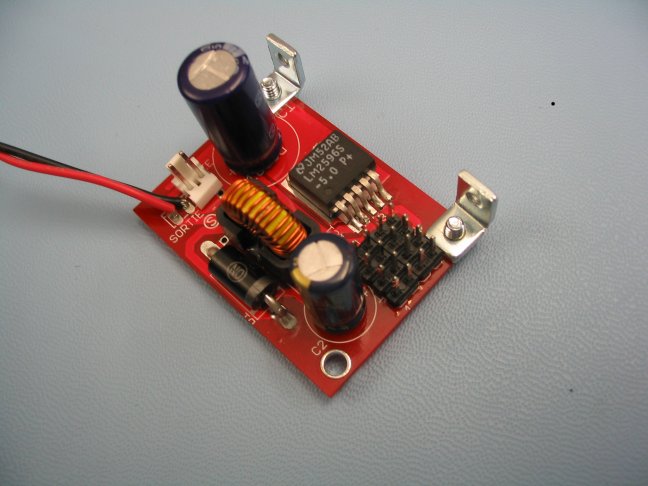
de tension de puissance à découpage
Une
alimentation à découpage (switching
power supply) permet de fournir une source de tension régulée
même si un courant assez fort est demandé. Il s'agit d'un
dispositif électronique qui sert ici pour l'alimentation des
servomoteurs. En effet, la carte mère ne peut pas fournir le
courant que demandent les servomoteurs, car son régulateur et/ou son
redresseur ne le supporteraient pas. De toute façon, une pile de 9
volts n'est pas très bien adaptée pour fournir un courant de 500
mA. On branchera donc le servomoteur à la source de tension de
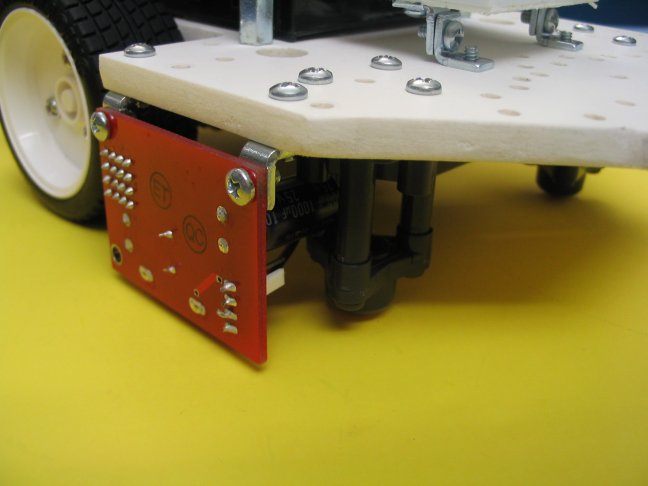
puissance à découpage. Ce circuit a des trous espacés de 1.5
pouce ce qui fait qu'il peut être installé à plusieurs endroits
sur le robot. En particulier, il peut se loger sous le robot, du
côté gauche, à l'aide d'angles métalliques comme le montrent les
photographies.
Les
trous de 3/8e dans la base permettent le passage des fils
entre le circuit d'alimentation et les servomoteurs, au besoin.
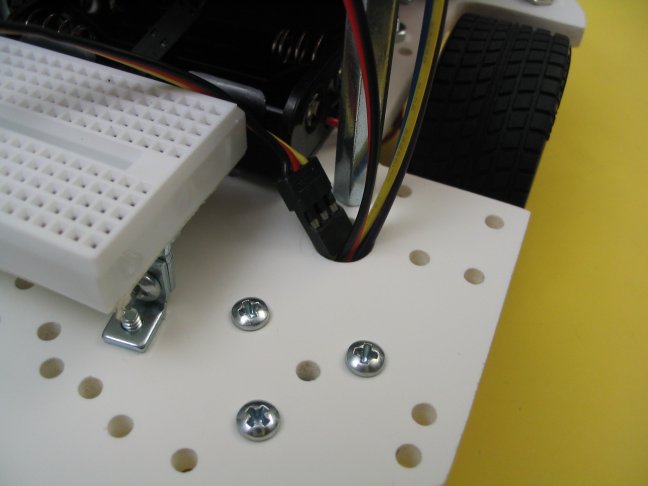
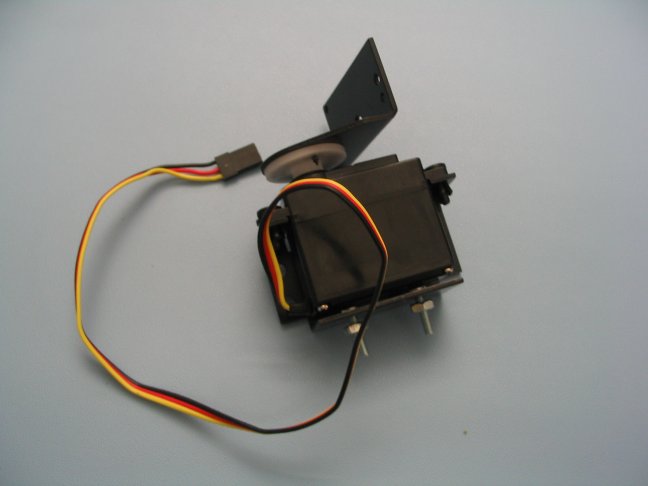
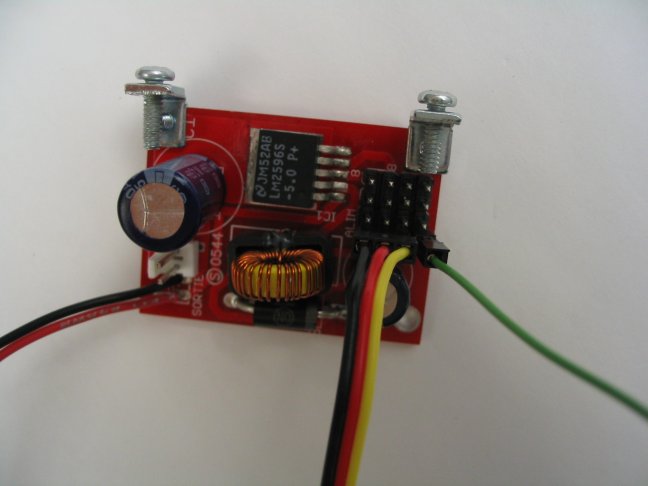
Les
servomoteurs viennent toujours avec un câble constitué de 3 fils.
Le fil noir est pour la masse, le rouge pour l'alimentation à 5
volts, et le jaune est pour le signal d'entrée permettant le
contrôle du servomoteur. Comme le signal qui contrôle le
servomoteur viendra de la carte mère, il faut un autre câble de 1
fil (en vert sur la photographie). Ils doivent être exactement
disposés comme le montre la photographie. La source de tension à
découpage peut fournir du courant à 4 servomoteurs. S'il faut en
brancher d'autres, la position des câbles demeure la même sur les
lignes de connecteurs IDC supplémentaires au-dessus de l'arrangement
montré en exemple sur la photographie.
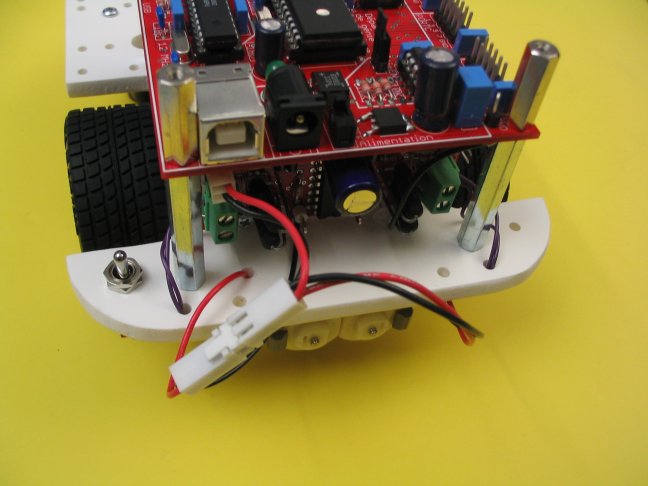
Le câble
rouge et noir qui alimente le circuit doit être routé jusqu'à
l'arrière du robot où il pourra être connecté au câble provenant
des piles AA. Il faudra que ce dernier soit d'abord déconnecté du
circuit du pont en H. Il pourra par contre être rebranché tout de
suite dans la partie mâle du câble provenant du circuit
d'alimentation à découpage. De cette façon, les piles fourniront
du courant à la fois au circuit du pont en H et à celui de
l'alimentation à découpage. Deux sangles en nylon pourront être
placées entre la carte mère et les tiges d'espacement qui la
retiennent. De cette façon, le câble du circuit d'alimentation à
découpage ne gênera pas le mouvement des roues arrière.
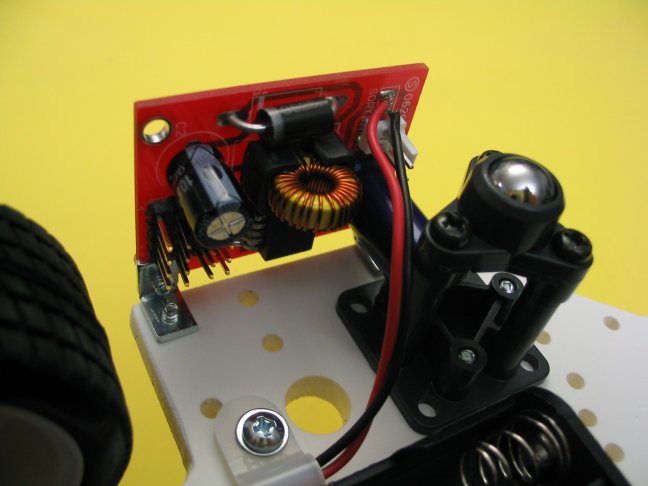
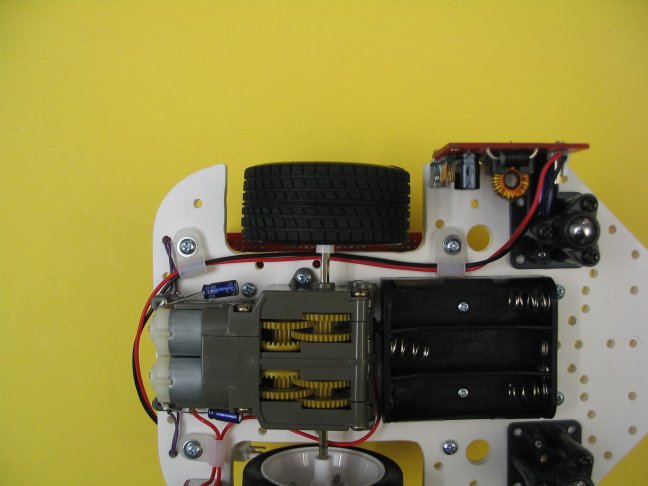
Il est
aussi possible d'installer le circuit du côté droit du robot. Dans
ce cas, il faut procéder délicatement puisque le condensateur de
1000 μF vient s'appuyer sur la roulette de type boule. L'avantage
de cette configuration est que l'accès aux connecteurs IDC est plus
facile. Le routage du fil peut se faire sous le robot en ajoutant
des sangles de nylon juste sous les tiges d'espacement qui
maintiennent la carte mère comme le montre la photographie.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}