Fichiers
La
conception du robot et la méthode pour le programmer impliquent
toute une série de fichiers. Cette section du site web donne les
détails sur ces sujets. Rien de ce qui est présenté ici n'est
nécessaire directement pour suivre le cours, mais bien des
renseignements intéressants s'y trouvent pour ceux et celles qui
désire aller plus loin avec leur robot. Les fichiers les plus
importants se retrouvent aussi sur un site
Github.
Conception
du robot
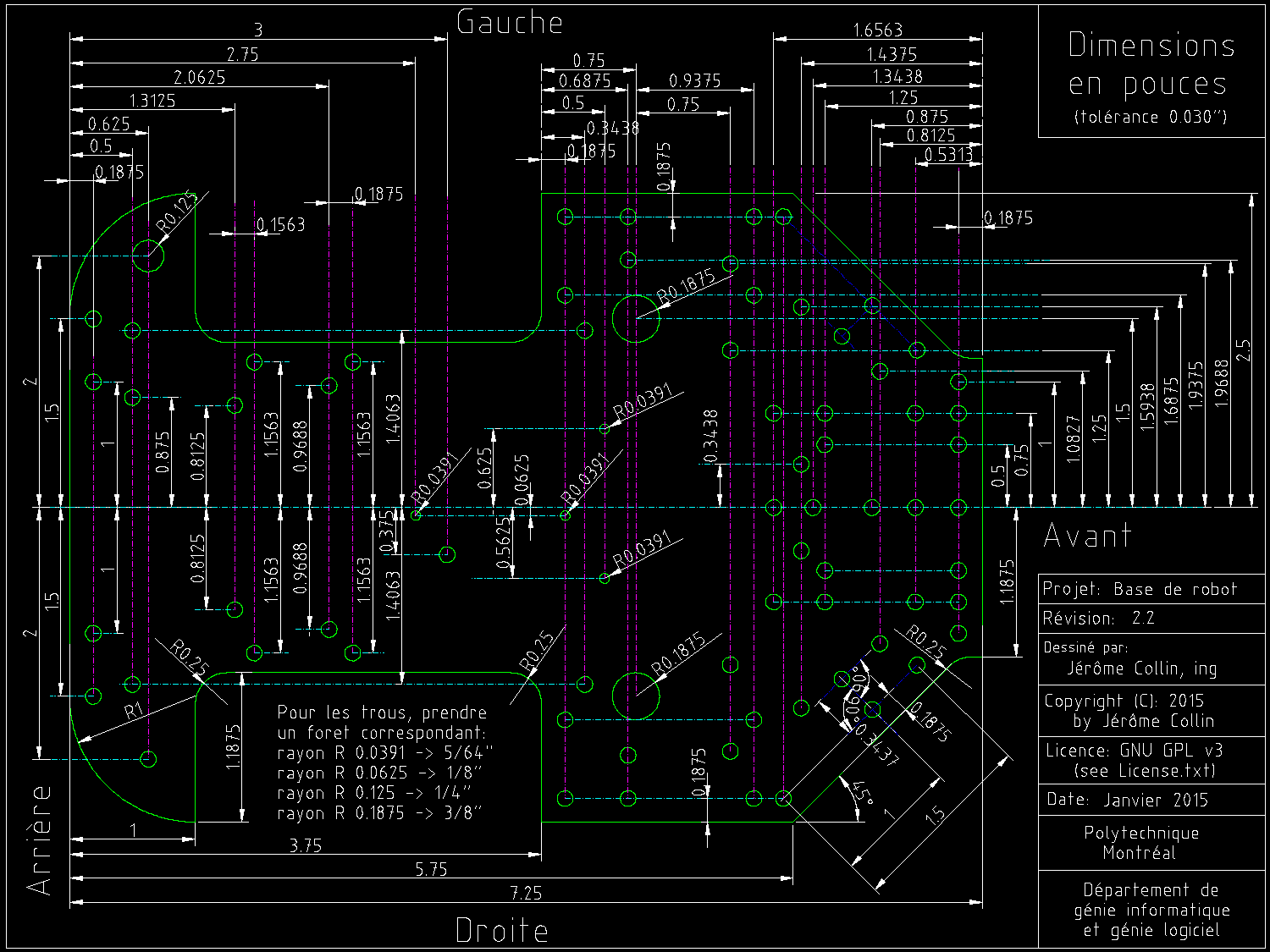
Le robot
est d'abord constitué d'un ensemble de pièces
électroniques et mécaniques offertes sur le marché. Quelques
pièces sont aussi fabriquées sur mesure. C'est le cas de la base
du robot fait de plastique PVC de 6mm d'épaisseur. Un dessin
en format DXF (format utilisé par Autocad
et Qcad) donne
les dimensions de la pièce. Les fichiers montrant les vues
schématique et topologique (layout)
des circuits imprimés du pont
en H et de la carte
mère pour le logiciel Eagle
sont aussi fournis. Les fichiers
«Gerber» pour la fabrication des circuits sont inclus
également. Tous ces documents techniques sont sous licence GPL.
Modélisation
en 3 dimensions du robot
M.
Louis-Philippe Bourret a patiemment travaillé avec le logiciel
Blender
pour modéliser le robot en
trois
dimensions. Le rendu graphique est très joli. Un premier
fichier montre le robot lui-même sans aucun éclairage ni
animation alors qu'un second
le montre dans le contexte d'une épreuve avec éclairage et
animation. Nous remercions M. Bourret de sa collaboration.
Le
micrologiciel (firmware) sur la carte mère
Le
micrologiciel
usbaspPoly est un programme qui doit être chargé sur le
microcontrôleur ATMega8 sur la carte mère. Ce code très complexe
gère les échanges par port USB avec le PC. Le micrologiciel a été
développé par le groupe
Objective
Developpement (partie vusb) et par Thomas
Fischl (partie USBasp), mais a été modifié par Matthew
Khouzam, ancien étudiant en maîtrise à l'École Polytechnique de
Montréal en génie informatique. Matthew a écrit un rapport qui
accompagne le code. Une lecture du rapport, du code et du document
“USB
in a nutshell” peut permettre a une personne motivée de
comprendre les détails du protocole USB sur la carte mère. Matthew
Khouzam est un des plus grands contributeurs au projet de robot en
INF1900.
Une licence
particulière accompagne ce logiciel.
Le
chargement
du micrologiciel sur une carte mère doit se faire en suivant à
la lettre une suite d'opérations précises.
Programmes
développés pour le cours
Une fois
que la carte mère peut communiquer avec le PC par le port USB, il
faut tout de même avoir un programme qui peut aller lire et écrire
les données sur ce port. Lorsqu'on programme la carte en utilisant
la commande “make
install”, l'utilitaire de
chargement avrdude est appelé par une des règles du Makefile. Ce
programme se charge d'ouvrir un canal de communication vers le port
USB pour envoyer les données vers la carte. Par contre, lorsqu'on
désire rediriger les données émises par RS232 vers le câble USB,
il faut utiliser le programme serieViaUSB
pour y arriver. Tout comme avrdude, serieViaUSB ouvre un canal de
communication vers le port USB pour permettre les échanges de
données. Il n'y a aucune licence associée à ce programme.
Le petit
programme progmem
utilisé surtout pour le travail pratique 9 est en réalité un
compilateur écrit avec l'analyseur lexical Lex
(plus précisément sa variante GNU appelée Flex)
et l'analyseur syntaxique YACC
(plus précisément sa variante GNU appelée bison).
En bref, ces deux outils sont très utiles pour écrire des
compilateurs. La compilation est étudiée en détail dans le cours
LOG3210.
Le code du programme progmem peut être utilisé librement et n’est
distribué sous aucune forme particulière
de licence.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}