INF1900
Projet
initial de système embarqué
Travail
pratique 8
Méthodes
pratiques de débogage
Objectif:
Accroître la capacité à détecter des problèmes logiciels et
matériels
Durée:
Une semaine
Travail
préparatoire: travail pratique 7
Document
à remettre: L’ajout d’un module de débogage au travail
pratique 7 qui est à remettre avant le lundi
16 mars
17h00.
Présentation
en classe: fichier
PowerPoint de la présentation
«If something works, it's less
challenging, it's less interesting. If something's gone wrong,
you want to know why it's gone wrong, and it's a learning
process.»
|
-
|
James
Dyson, créateur de l’aspirateur sans sac.
|
«Programming allows you to think
about thinking, and while debugging you learn learning.»
|
-
|
Nicholas
Negroponte
|
Introduction
Le
débogage d’un programme. Un art ? Une science ? Un peu des deux ?
On peut certainement dire que c’est une capacité qui se développe
avec le temps et la pratique. Elle s’améliore avec la
compréhension des systèmes et des langages de programmation. Donc,
il y a nécessairement une forme d’expérience et de confiance
impliquée dans son acquisition. Il faudra donc une certaine forme
de patience avant de devenir habile à déboguer du code.
Est-ce
qu’il y a au moins quelques règles ou conseils à mettre en place
dès maintenant qui peuvent aider à cet aspect fondamental ?
Absolument ! Ici, on montrera une technique un peu plus systématique
et aussi quelques conseils de base importants. Et on laissera le
temps faire le reste… On ne peut certainement pas vider la
question en un seul laboratoire. On ne peut nier que le sujet
s’applique de façon plus aiguë dans les projets intégrateurs
cependant. La raison est que les systèmes à développer sont plus
gros que dans les autres cours et qu’ils mettent en valeur des
notions vues dans plusieurs autres cours. Le risque d’apparition
de bogues dans le code d’un projet intégrateur augmente
naturellement et la pression sur le développement de bonnes
habiletés de mise au point du code s’accentue.
Cependant,
on aura recours aussi à quelques points de départ tirés de la
littérature. On ajoute aussi une partie qui est le fruit de nos
observations des étudiants en projet de première année. On doit
aussi dire que la qualité du code a une influence sur le
processus...
Dispositions
pour faciliter le débogage
Mais,
justement, par où commencer ? En fait, on peut commencer par ce
qu’on a déjà peut-être un peu accumulé comme expérience dans
le cours depuis le début de la session pour intuitivement tenter une
forme de réponse. Il est incontestable qu’il y a des dispositions
qui facilitent l’analyse et la détection de bogues.
Nécessairement, avoir un environnement calme autour de soi qui
facilite la concentration est souhaitable. À l’autre extrême,
verbaliser son problème au coéquipier est certainement valable
également et peut mener directement à la solution.
Aussi,
lire la documentation. On est toujours surpris de voir des étudiants
qui travaillent à un poste sans description du travail pratique ni
document (Atmel, AVRLibC, etc.) ouverts dans un fureteur ou
autrement. En informatique, il faut lire… Une certaine maîtrise
de l’environnement de développement, des outils de déverminage et
même de Git aideront également.
Avant
tout, il faut écrire un code lisible et compréhensible… Un code
bien indenté et bien écrit est nécessairement plus facile à
corriger. C’est indéniable, autant à court terme qu’à long
terme par les membres de l’équipe. «Redresser» son code juste
avant de le soumettre pour avoir ses points par le chargé de
laboratoire lors de la correction n’est pas une bonne habitude à
prendre. On se nuit à soi-même bien avant en étant incapable de
faire ressortir clairement les opérations importantes du code. Le
débogage devient substantiellement plus difficile par le fait même.
Évidemment, l’utilisation de noms de variables et de fonctions
significatifs va dans le même sens, tout comme l’écriture de
commentaires appropriés.
Dans
la même veine, on peut aussi mentionner une mauvaise utilisation de
Git durant le développement. Souvent, au laboratoire, les chargés
de laboratoire voient que le code développé n’est pas sous Git ou
n’est pas soumis régulièrement. Git n’est pas d’abord un
endroit où on soumet un devoir pour correction! C’est une façon
de sauvegarder ses changements et de les partager entre membres d’une
même équipe d’abord et avant tout. Un programmeur ne veut pas
regarder Git comme un outil HPR! … Mais c’est peut-être aussi
une partie de la réalité, il faut bien l’admettre. Chose
certaine, les équipes qui ont du succès sont bien structurées et
portent une attention particulière aux détails et à leurs
habitudes de travail. C’est indéniable. Point.
Un
autre problème comme on peut fréquemment observer en INF1900 est un
code trop long, autant en «largeur» qu’en «longueur».
Détaillons. Par largeur, on veut dire des lignes de code trop
longues. Beaucoup de programmeurs encore aujourd’hui essaient de
limiter leurs lignes à un nombre autour de 80 caractères (une
veille limite des systèmes des années 1970, mais qui conserve son
prestige!) Quand cette règle n’est pas respectée, il faut
commencer à se poser des questions: est-ce qu’il serait préférable
de déplacer le commentaire au-dessus de la ligne ? Expression trop
longue et complexe en cause ? Appel de fonction avec des paramètres
qui sont des expressions trop longues ou des paramètres qui sont
eux-mêmes des appels de fonctions ? Il faut essayer de raccourcir
les lignes pour conserver la lisibilité du code. Nos yeux regardent
surtout du code de haut en bas, et peu de gauche à droite.
Le
code peut aussi être trop long au sens où on écrit des lignes et
des lignes sans même tester les premières lignes écrites.
Souvent, on arrive devant un code fraîchement écrit dans le cadre
du cours et qui fait 500 lignes et on ne sait même pas où il bloque
et où est le problème. Souvent, le code ne compile même pas.
C’est inutile. Avant d’aller voir si la ligne 478 est en cause,
il faudrait peut-être s’assurer que les 10 premières
fonctionnent. C’est simplement logique, mais il faut être capable
de rapidement s’assurer de ce qui fonctionne et ne fonctionne pas
avant même de chercher précisément où est le problème. Souvent,
cette étape est la plus longue. Régler le problème peut aller
très vite par la suite. Un principe important qui doit guider le
processus de débogage est d’arriver à isoler le problème et
d’être capable de le répliquer dans un code plus court pour les
mêmes entrées et, si possible, par une séquence plus courte
d’opérations. Le premier endroit pour commencer la recherche d’un
problème vient de la liste des messages de la compilation parce que
ça prend 10 secondes à regarder! Souvent, on a tendance à faire
la commande «make install» directement sans regarder les «warnings»
du compilateur qui peuvent révéler des subtilités à ne pas
négliger. Faire simplement une commande «make clean», suivie
d’une commande «make» et regarder ce que le compilateur a à nous
dire. 10 secondes qui peuvent être payantes...
Le
débogage, quelques principes reconnus
Mais
est-ce que tous ces «petits trucs» s’inscrivent dans une théorie
plus structurée sur le sujet ? L’article «Learning
to Troubleshoot : A new Theory-Based Design Architecture»
présente un bon tour d’horizon de la question. Ce qui suit en est
pratiquement une traduction française des éléments les plus
importants. On y apprend que le débogage est une catégorie de
résolution de problème parmi les plus communes. Le débogage a des
caractéristiques reconnues :
Il
n’est pas toujours bien défini parce que la personne qui fait la
mise au point doit déterminer l’information pour établir le
diagnostic. Exemple : est-ce que le multimètre peut m’aider à
résoudre ce problème ?
Une
bonne représentation conceptuelle du système est requise. Exemple
: est-ce que l’interruption de la minuterie 1 est bien ajustée
dans ce code ?
Il
y a généralement un seul problème, mais ceci n’exclut pas un
ensemble de fautes dans le système.
Il
y a une solution connue qui règle ce problème de façon assez
simple. En d’autres mots, ce n’est pas toute la conception qui
est à revoir, mais plutôt un ajustement. Autrement, toute la
solution est à revoir et on n’est plus dans le débogage.
Il
est plus difficile pour les débutants d’apprendre le débogage,
car ses règles de diagnostic sont basées sur l’expérience.
Demande
à un apprenant ou une apprenante de prendre une décision sur la
nature du problème.
Varie
beaucoup d’un système à l’autre ce qui est toujours difficile.
En
progressant de débutant à expert dans le domaine, une personne en
situation d’apprentissage s’enrichira de modèles conceptuels
(mental) des systèmes sur lesquels elle travaille. Plus ces
situations seront nombreuses, plus les solutions arriveront
rapidement parce qu’il y aura eu une intégration personnelle des
connaissances du domaine, d’informations contextuelles et souvenir
de problèmes semblables affrontés par le passé. Souvent même,
ces souvenirs deviendront pratiquement le principal outil de
débogage!
Alors,
sur quels axes doivent s’étendre les habiletés de débogage à
développer ? Il y a quelques généralités bien identifiées :
Une
bonne connaissance du domaine en général, le génie informatique
et le génie logiciel dans notre cas, bien entendu.
Une
connaissance du ou des systèmes impliqués (la carte et sa
programmation particulière dans ce cours).
Connaître
les procédures de débogage (par des tests, des mesures, des
évaluations de performances, etc.) pour attaquer le problème.
Avoir
une connaissance de bonnes stratégies de débogage. Nécessaire
pour isoler les problèmes potentiels, tester et évaluer des
hypothèses et réduire l’espace du problème.
L’apprentissage
(à la dure, parfois…) par l’expérience et la pratique. On n’y
échappe pas vraiment, malheureusement.
Depuis
le début de la session, il y a nécessairement eu amélioration des
deux premiers éléments. La démarche qu’on vous propose dans la
section qui suit s’inscrit vraiment dans la troisième, connaître
les procédures de débogage. En plus, elle sera suffisamment
puissante et générique pour établir de bonnes stratégies de
débogage par la suite.
Parmi
les grandes stratégies de débogage, on peut en mentionner ces cinq
:
Essaie
et erreur : se passe presque d’explication tellement elle est
intuitive… On change un paramètre et on regarde l’effet en
sortie. On en change un autre et on recommence.
Stratégie
exhaustive : si on sait qu’il peut y avoir 6 grandes situations
typiques par exemple, on les essaie toutes jusqu’à trouver le
problème. Appelé aussi élimination en série. Peut fonctionner
pour les systèmes simples.
Par
topologie : dans le code, pour nous, si on détecte un problème
avec une partie de code, on essaie de suivre ce qui est appelé par
ce code ou ce qui appelle ce code. On procède donc en amont
(backward) ou en aval (forward).
Séparation
en deux : on isole ce qui est connu pour fonctionner de ce qui peut
être douteux. En itérant sur ce qui est douteux, on espère ce
convaincre qu’on arrive à confirmer de plus en plus de sections
comme étant fonctionnelles et que le problème sera dans une
portion de moins en moins grosse et deviendra isolée, voir
évidente.
Détection
par irrégularité fonctionnelle : peut-être un peu plus difficile
à cerner, mais peut-être aussi la plus avancée. Il vise à
établir une différence entre ce qui est attendu et ce qu’on
obtient comme résultat. On vise ici à trouver une série de
combinaisons d’entrées qui mènent de façon répétée à cette
différence. Peut rapidement devenir complexe avec les logiciels.
Elle nécessite un bon doigté et de la patience, car établir la
séquence parfaite peut s’avérer difficile. Par contre, le test,
si bien reproductible, peut mener directement au bogue.
En
général, la recherche a montré que, basé sur l’expérience, la
stratégie qui vise à trouver les bogues les plus communément
rencontrés est généralement payante et celle qui est aussi la plus
souvent employée par les gens d’expérience. On peut ajouter que
les personnes les moins bonnes à déboguer sont celles qui
établissent les moins bonnes hypothèses, les poursuivent trop
longtemps, ont de la difficulté à reconnaître une information
critique et utile en cours de chemin, établissent moins de tests
significatifs et négligent également la vérification de leurs
résultats du travail effectué.
Ceci
complète ce petit tour de la théorie. On peut maintenant regarder
une stratégie plus précise pour le laboratoire.
Démarche
plus systématique pour le code
Bien
entendu, lorsqu’on se retrouve dans un processus de débogage, on
se dit à peu près toujours qu’il serait utile de savoir l’état
de la variable X à tel moment
donné durant l’exécution du programme. Par contre, assez
souvent, la paresse nous gagne, car on sait que la démarche implique
d’ajouter des printf (cout
ou valeurs retournées par RS232, …) dans le code pour y arriver.
De plus, si on se trompe de variable, on doit tout reprendre. On
sait aussi qu’on devra enlever tout ce code avant la remise
puisqu’il n’est là que pour régler ce problème ponctuel.
Tous
les programmeurs ont fait face à cette situation qui se présente à
peu près toujours durant une démarche de déverminage de code. Ce
problème a-t-il une forme générale de solution qui peut être
appliquée systématiquement ? Certainement ! En fait, pour être
précis, ce qui est cherché ici est une invocation de la commande
make qui recompilerait le code avec des
instructions de débogage pour faire sortir ces valeurs de variables
à divers moments durant l’exécution. Par contre, la commande
make habituellement exécutée
remettrait le code tel qu’il était avant après le débogage. Cet
idéal peut s’obtenir, mais il faut travailler un peu pour
l’obtenir...
Avant,
regardons cet extrait de code avec des «macros» du langage C/C++:
#define
DEBUG // à
mettre en commentaire ou
non
au besoin
#ifdef
DEBUG
#
define DEBUG_PRINT(x) printf (x) // ou par RS-232
#else
#
define DEBUG_PRINT(x) do {} while (0) // code mort
#endif
Ces
quelques lignes montrent qu’on peut créer une «fonction» (on
aime jamais vraiment le terme lorsqu’on parle de macros…) qui
serait tout simplement un printf (ou des
instructions en RS232 dans notre cas) pour retourner au PC des
valeurs pouvant être analysées pour aider au débogage. La même
fonction pourrait aussi être remplacée par un code bidon (souvent
appelé «code mort») qui sera éliminé par le compilateur avant de
générer le fichier binaire. De cette façon, il n’y aura aucun
surcoût à l’exécution.
Alors,
comment utiliser un tel mécanisme dans le code maintenant ? Ici,
selon la situation, on pourra faire preuve de créativité. Dans une
situation où on utilise à la base un printf,
on peut avoir beaucoup de souplesse dans l’utilisation des
arguments pour un usage pouvant convenir à plusieurs contextes
différents. Par exemple:
DEBUG_PRINT(("INFO:
Génération de statistiques activée"));
DEBUG_PRINT(("var1:
%d; var2: %d; str: %s\n", var1, var2, str));
On
notera au passage les doubles parenthèses: une pour la fonction
printf
et une pour l’appel à la macro DEBUG_PRINT
elle-même. C’est une particularité de la syntaxe dont il faut
tenir compte pour éviter les ennuis. Dans un petit code de système
de système embarqué sur le robot, on peut avoir une formule un peu
plus simple avec seulement deux arguments fixes: une chaîne de
caractères et un entier par exemple.
Le
choix du comportement de DEBUG_PRINT
dépend de la valeur de DEBUG.
Ici,
on ne fait que tester si DEBUG
existe ou non. Dans des systèmes plus complexes, on peut aussi
avoir une valeur possible de DEBUG
de
1, 2, 3, 4 ou 5 pour augmenter l’information en sortie. On dit
souvent «contrôler le niveau de verbosité» à afficher. Ce même
contrôle peut aussi se faire avec une
plus
significative:
FATAL,
ERROR,
WARN,
INFO,
DEBUG,
TRACE
par exemple. Dans de tels cas, il peut y avoir plusieurs définitions
de la macro DEBUG_PRINT
pour
couvrir l’ensemble des besoins d’information pour chaque type de
message à produire en sortie.
La
question devient maintenant comment ajuster la valeur de DEBUG
?
On
peut avoir à éditer à chaque fois le fichier pour mettre ou non en
commentaire la première de ces lignes pour avoir l’une ou l’autre
des variantes de DEBUG_PRINT.
Mais on peut être encore plus systématique en passant l’argument
-DDEBUG
(oui, deux «D» de suite, -D suivi de
DEBUG) à
l’invocation du compilateur GCC pour obtenir la définition de
DEBUG
ou non. L’argument sur
la ligne de commande
devient donc intéressant. Par contre, on ne fait que déplacer le
problème puisqu’on doit maintenant éditer manuellement à chaque
fois le Makefile plutôt que le fichier source… Évidemment, ce
problème peut être résolu. Il
suffit d’ajouter une ou quelques règles au Makefile pour y arriver
et invoquer sur la ligne de commande. Ce lien
montre diverses façons
d’y arriver:
%
make debug
En
résumé, on veut placer des appels à DEBUG_PRINT en divers points
stratégiquement bien choisis dans le code pour tirer de
l’information pour aider au débogage. On laisse ces appels de
façon permanente dans le code. On les «active» en situation de
débogage (avec make debug) ou ces appels tournent en du code qui,
ultimement, sera éliminé par le compilateur et ne générera donc
par de surcoût à l’exécution lorsqu’on est en mode normal de
fonctionnement. On peut placer la définition de DEBUG_PRINT dans
notre librairie, car son potentiel de réutilisation est élevé
puisqu’on peut en avoir besoin dans de très nombreuses situations
de développement de code d’application quelconque.
Problèmes
courants
Normalement,
lorsqu’un problème logiciel se présente avec le robot, le code
est la source du problème, plus
souvent que le matériel. On peut, trop tenir de statistiques, mais
sans trop se tromper non plus, affirmer qu’il y a quelques
catégories
courantes de problèmes plus fréquentes que d’autres:
Des
variables non initialisées ou peut-être surtout mal réinitialisées
en cours d'exécution par la suite si on réutilise la variable.
Confusion
dans la direction d’un port, surtout lorsque le port en question
est partagé par plusieurs périphériques (exemple pour le port D:
utilisation
combinée du RS-232, du
bouton-poussoir et
de la minuterie 1)
Débordement
d’une valeur de 8 bits après incrémentation dépassant 255.
Comparaison
entre une valeur de
16 bits et une de 8 bits.
Dangereux…
Des
situations de logique inversée. Le signal attendu est actif au
niveau bas et non au niveau haut. Ceci peut se présenter aussi
avec les signaux d’entrée, même
avec des interruptions!
Cavalier
en position (ou non) qui nuit à l’usage du port (par le
périphérique ou pour l’usage général). Même
les connexions dans SimulIDE doivent être vérifiées...
Voici
quelques autres situations pour exercer votre œil à rapidement
repérer des problèmes courants sur le robot, que ce soit dans le
code ou avec le matériel. Pouvez-vous les cibler directement ?
Exercice
à travailler en laboratoire
Il
faut mettre un tel mécanisme en place dans votre librairie. Il
faudra créer un fichier avec un nom significatif comme debug.h
(et probablement aussi debug.cpp) et les
incorporer à votre librairie. Ces deux nouveaux fichiers n’ont
pas pour buts d’aider le débogage de la librairie elle-même, mais
plutôt de l’application qui utilisera la librairie éventuellement.
Il est plus rare qu’on ait à analyser ce qui se passe dans une
librairie en tant que développeur d’application. Par contre,
c’est vrai, rien n’empêcherait d’ajuster le mécanisme pour
être capable de mettre au point une librairie en développement,
mais c’est un peu hors de notre propos. En conséquence, on ne
compilera pas la librairie avec la commande «make debug». La seule
modification à faire au Makefile du code de librairie est de prendre
en charge les nouveaux fichiers debug.h
et debug.cpp.
Du
côté de l’application qui utilisera la librairie, il faudra par
contre ajuster le Makefile pour qu’il puisse régler la valeur de
DEBUG et la passer correctement au compilateur (mais pas à l’éditeur
de liens, car, on le sait, ce serait inutile). Ce mécanisme
deviendra générique et utile dans pratiquement toutes les
situations (et pas seulement sur le robot!), d’où son intérêt à
l’intégrer à même sa propre librairie. Il sera fort utile pour
le reste du projet, bien évidemment.
On
vous suggère de reprendre le code de la machine à états logicielle
du travail
pratique 2 pour renvoyer au PC par RS232 la valeur de la variable
qui maintient l’état de la machine. Cet exercice permettra de
vérifier que votre mécanisme de débogage fonctionne correctement.
Pour
la remise, ne pas créer de répertoire tp/tp8 mais ajouter
simplement vos quelques fichiers dans le répertoire tp/tp7.
Qualité
du logiciel
Comme
il y a moins de code C++ à écrire cette semaine, on n’introduit
aucune nouvelle règle de qualité du code avec ce travail pratique.
Par contre, le lien entre la qualité du code a une influence
évidente du le débogage du code, tel qu’expliqué plus haut. Il
n’est donc jamais trop tard, puisqu’on continue de travailler sur
la librairie de la semaine précédente, de modifier le code de
l’équipe pour le rendre de meilleure qualité et de continuer de
progresser dans l’établissement de bonnes habitudes de travail en
développement de code.
Pouvez-vous
identifier le problème rapidement ?
Juste
quelques petites «faciles» (hummm…) en passant...
Problèmes
logiciels
Quelques
extraits de code où vous devriez être capable de rapidement repérer
le problème ou profiter de conseils supplémentaires...
Extrait
de programme 1:
.
. .
switch
(etat) {
case
INIT:
if
( (PIND & 0x04) == 0 ) {
etat
= ETAT1;
break;
}
case
ETAT1:
if
( (PIND & 0x04) != 0 ) {
etat
= ETAT2;
}
break;
case
ETAT2:
if
( (PIND & 0x04) == 0 ) {
etat
= INIT;
}
break;
default:
etat
= INIT;
}
.
. .
Très
subtile comme erreur… Pouvez-vous le voir rapidement ?
Extrait
de programme 2:
.
. .
int
main()
{
DDRA
= 0xFF;
char
vec[5] = { 'H', 'e', 'l', 'l', 'o' };
uint16_t
i = 0;
initialisationUART();
for(;;)
{
PORTA
= 0x01;
vec[i++]
= i;
transmissionUART
( vec[i] );
//
on devrait quitter ce programme éventuellement... mais non...
if
(i == 50) {
PORTA
= 0x00;
return
0;
}
}
return
0;
}
Oui,
il y a bien entendu débordement du vecteur. C’est intentionnel.
Sur un PC, ce genre de
code risque de peut-être provoquer un message d’erreur assez
rapidement ou, au moins, les sorties générées risquent de
provoquer un questionnement plus rapidement dans la tête du
programmeur. Sur
la carte mère, sans système d’exploitation, aucun message n’est
généré. Dans des cas comme celui-ci, le fait d’éventuellement
dépasser certaines zones de mémoire risque de provoquer un «reset»
du processeur ce qui donne l’impression de ne jamais sortir de la
boucle. Ou pire, d’en sortir seulement de temps à autre sans
qu’on soit capable d’en reproduire les conditions à coup sûr…
Très difficile à détecter de façon générale.
Le
même symptôme peut se présenter lorsqu’une interruption est
activée, mais n’est pas prise en charge par une routine identifiée
par le bon type d’interruption. Pas mauvais à savoir...
Extrait
de programme 3:
Ceci
n’est pas une ligne fautive au sens où elle s’exécute
correctement, mais elle devient très longue… (133 caractères!)
Simplement le fait de placer le commentaire au-dessus de la ligne de
programmation rendrait la lecture du code beaucoup plus simple.
Simplifier l’expression de test de boucle est évidemment aussi à
considérer.
while (((adresse/16) !=
nbInstruction ) && (instruction != fin)){ //Lire et executer
toutes les instructions jusqu'a rencontrer une fin
Cette
ligne de code a le même problème, mais il peut être réglé
différemment. En effet, il est toujours possible de place un «\»
en fin de ligne en C/C++ pour permettre de poursuivre sur la ligne
suivante. Cette ligne pourrait donc être présentée plus
lisiblement sur quelques lignes sans changer quoi que ce soit à
l’initialisation du vecteur.
uint16_t vect[] = {11, 16, 12,
11, 1239, 147, 132, 465, 975, 85, 3196, 6208, 220141, 23, 22947,
26122, 2, 29422, 31, 31, 3999, 4470, 39222, 4, 40, 66, 944, 52123,
5324, 57, 61212, 959, 1740, 84, 0, 12880};
Extrait
de programme 4:
uint8_t OCR0A_500HZ =
uint8_t((F_CPU / (2.0 * 256 * 500)) – 1);
Cette
ligne ne présente pas vraiment, un problème en soit, mais elle fait
un grand calcul avec des valeurs flottantes. Pensez un peu à votre
pauvre petit processeur de 8 bits sans unité matérielle de calcul
point flottant… Dans un contexte de système embarqué,
demandez-vous s’il n’y a pas moyen de faire les choses
autrement. Combien de fois est fait ce calcul ? À quel moment dans
l’exécution du programme ? Est-ce que certaines valeurs
pourraient être précalculées ailleurs ?
Problèmes
matériels
À
partir de ces photographies, sans même prendre en considération le
code, il devrait y avoir un problème évident associé au matériel
dans chaque cas. Quel est-il ?
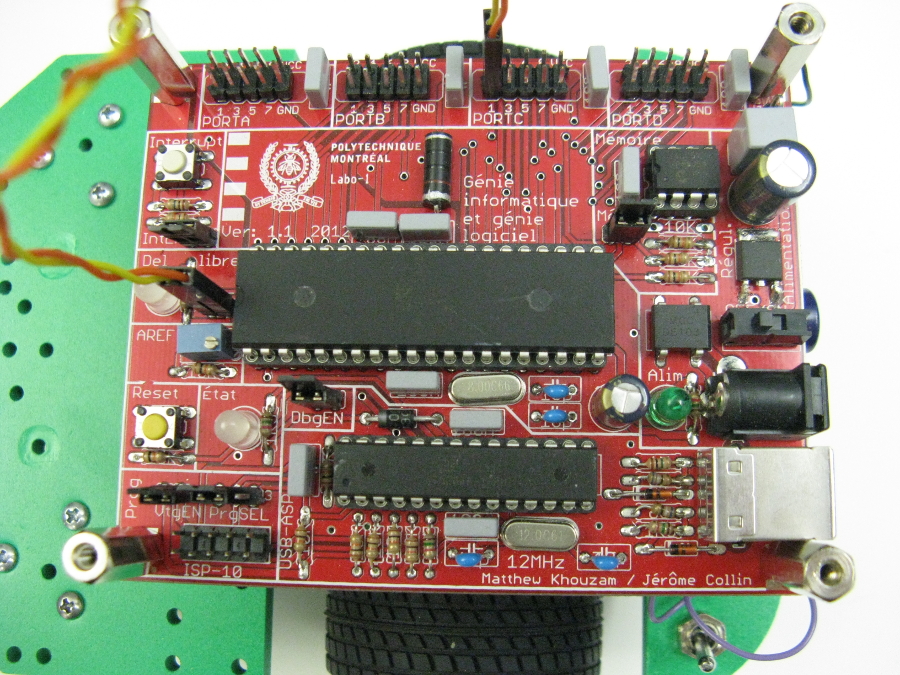


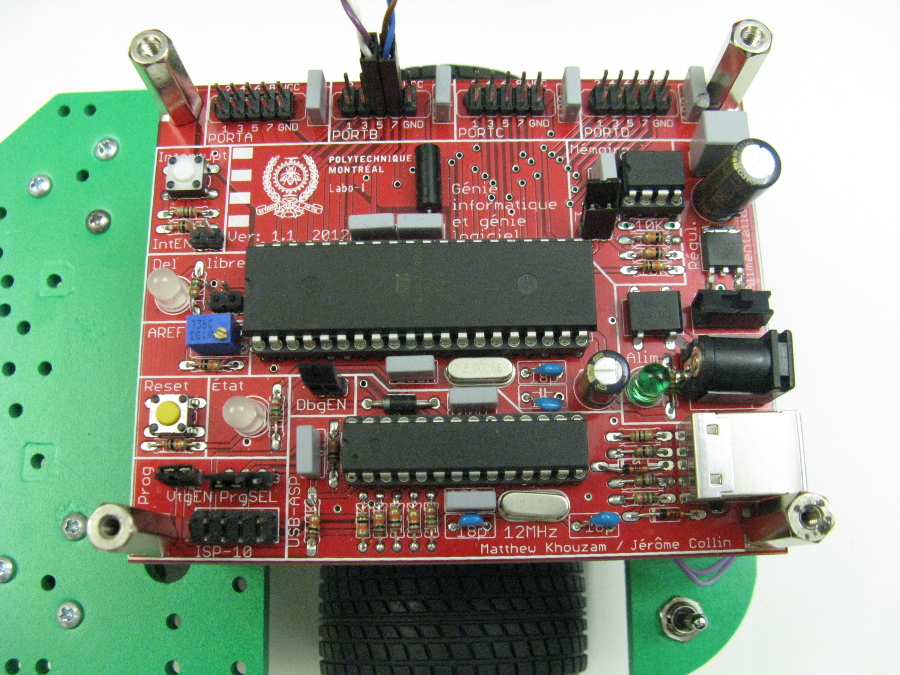
Dans
le cas de la dernière image, il n’y a pas vraiment de problème
comme tel, mais le fait de laisser un périphérique branché aux
ports B5, B6 et B7 durant que la carte est programmée (make
install), peut engendrer un conflit avec le ATmega8 qui travaille
à placer le code dans la flash du ATmega324PA en utilisant ces mêmes
signaux. Souvent, la conséquence est que le ATmega324PA perd sa
configuration (les «fuses» ne sont plus aux bonnes valeurs).
La manifestation visible sera que la carte paraîtra 8 fois plus
lente, car le ATmega324PA utilisera son horloge interne à 1 MHz
plutôt que l’horloge externe à 8 MHz. Les instructions de délais
seront donc faussées, mais on pourra mettre bien du temps avant de
s’en apercevoir...
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}