INF1900
Projet
initial de système embarqué
Travail
pratique No. 6
Capteurs
et conversion analogique/numérique
Objectif:
Introduire les interfaces et les capteurs
Date
de remise: Le lundi 23 février 17h00 au plus tard
Travail
préparatoire: Aucun
Documents
à remettre: Le code écrit pour résoudre les deux problèmes
sera placé sous Git et sera corrigé par les chargés de
laboratoire.
Présentation
en classe:
fichier
PowerPoint
“It
would appear that we have reached the limits of what it is
possible to achieve with computer technology, although one should
be careful with such statements, as they tend to sound pretty
silly in 5 years”
|
-
|
John von Neumann, 1903-1957
|
Introduction
Le but
de ce travail pratique est de prendre connaissance du monde des
capteurs et de voir la façon de les interfacer au microcontrôleur.
Dans un premier temps, l'attention sera portée sur les capteurs avec
une interface numérique. Par la suite, nous verrons les capteurs
analogiques et la manière particulière de les interfacer au
système. Il convient tout de même de limiter notre étude puisque
le domaine des capteurs est extrêmement vaste.
Dans les
travaux pratiques précédents, l'accent a été placé sur le
traitement automatique de l'information et sur la mécanique du
microcontrôleur. Par contre, peu d'effort a été fait sur
l'acquisition de l'information à traiter et les entrées en général.
Il est maintenant temps de voir comment des capteurs peuvent évaluer
des paramètres du monde extérieur et les traduire sous une forme
accessible au microcontrôleur.
Il est
important de garder en tête que le microcontrôleur traite des
signaux numériques, mais que les phénomènes physiques dans
l'entourage du robot ont une nature profondément analogique. Par
analogique, on entend une grandeur dans un domaine continu, et donc
dans lequel il existe une infinité de valeurs possible entre deux
points. La température et la vitesse peuvent être classées dans
cette catégorie. Cependant, un système numérique, par définition,
traite des valeurs discrètes. Un capteur dans notre système devra
donc fournir un signal directement sous forme numérique ou encore
sous forme de valeurs de tension. Dans ce dernier cas, cette
possibilité existe puisque le microcontrôleur possède un
convertisseur analogique/numérique intégré pour passer du monde
analogique à un monde basé sur des valeurs représentées par des
zéros et des uns.
Certains
capteurs pourraient être qualifiés de «simples» puisqu'ils se
connectent plus ou moins directement au microcontrôleur. Ces
capteurs peuvent être des interrupteurs, des détecteurs de niveau,
des encodeurs de priorité, des encodeurs de position (comme la
roulette d'une souris), etc. Leur caractéristique commune est
qu'ils fournissent des valeurs binaires déjà décodées ce qui
simplifie l'interface au microcontrôleur.
D'autres
capteurs peuvent avoir des interfaces beaucoup plus sophistiquées.
Un capteur avec une interface numérique avec un protocole est
souvent capable de prendre des données plus complexes et précises.
Ils peuvent utiliser des bus de tout type tel SPI (Serial Peripheral
Interface), I2C (Inter Integrated Circuit), ou encore une
communication série asynchrone ou parallèle. Ils sont souvent
remarquablement autonomes et fiables, surtout s'ils possèdent des
mécanismes intégrés de correction d'erreurs. Étant donné leur
système de contrôle numérique, ces capteurs ont une tendance à
coûter plus chers que les capteurs simples. Les exemples de tels
capteurs sont nombreux: sonars, caméras spécialisées,
thermomètres, détecteurs de fumée, accéléromètres, etc. Ces
capteurs peuvent souvent être vus comme des systèmes informatiques
complets en eux-mêmes. Il est probable que vous utiliserez de tels
capteurs dans quelques semaines.
Un
ATmega324PA est doté de ports capables de convertir un signal
analogique (voltage) en données numériques. Il le fait grâce à
un convertisseur analogique numérique (CAN). Le microcontrôleur
peut effectivement lire jusqu'à 8 signaux du port A. Le CAN
fonctionne en graduant une plage délimitée par deux voltages en 210
valeurs. La valeur la plus basse pouvant être représentée est 0
volt et la plus haute est la référence analogique (5 volts ou
moins). La valeur numérique fournie en sortie est proportionnelle à
celle de la tension d'entrée. L'utilisation du CAN est nécessaire
lorsqu'un système a recours à des capteurs dépourvus de capacités
de communication numérique, même les plus simples. On peut donc
placer ces capteurs dans une troisième catégorie, celle des
capteurs avec interface analogique. Le deuxième problème de ce
laboratoire montrera comment utiliser une photorésistance comme
capteur avec interface analogique.
Pour
bien comprendre la nature d'un capteur simple, il faut avoir quelques
notions
de circuits électriques de base. La lecture de cette section du
site web est importante. Elle
offre un court rafraîchissement sur des notions électriques
connues, mais remises dans le contexte du cours.
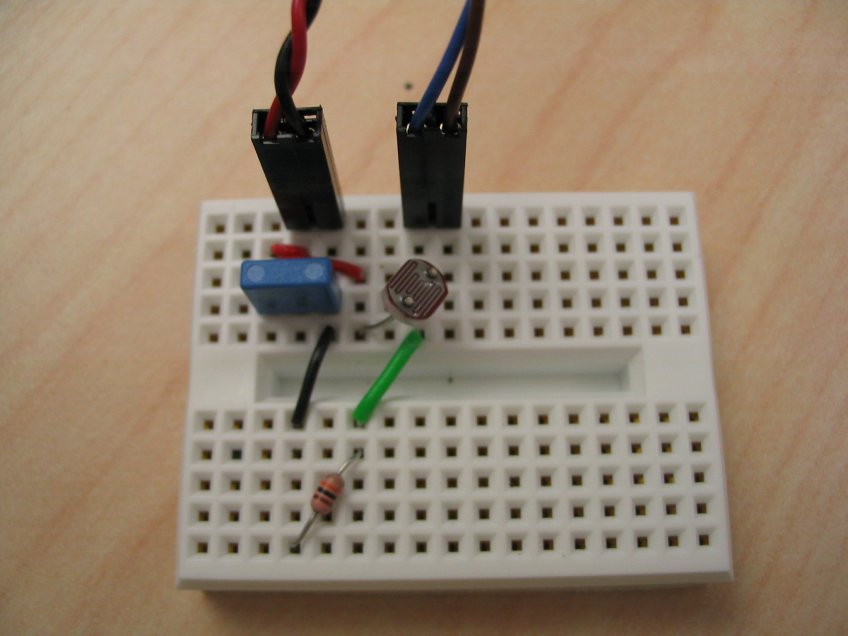
Problèmes
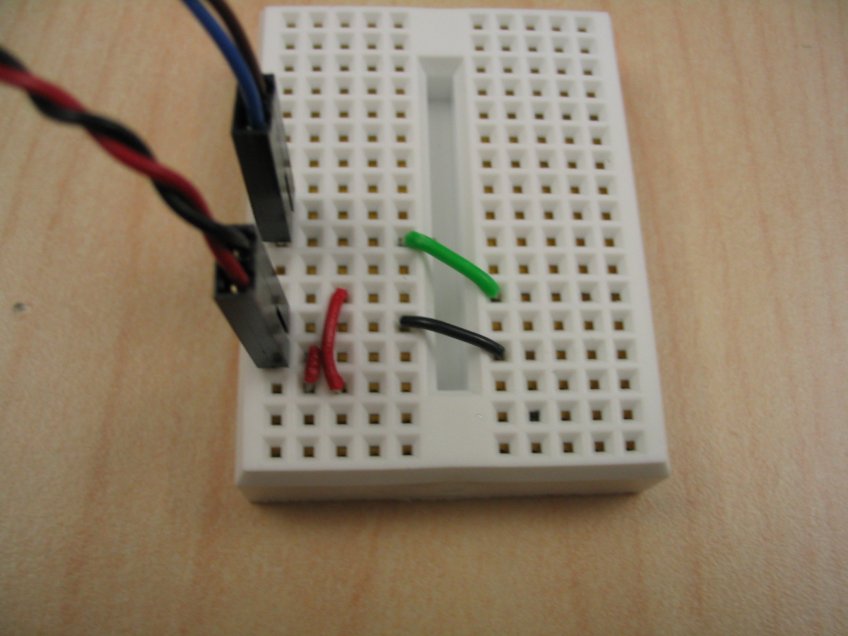
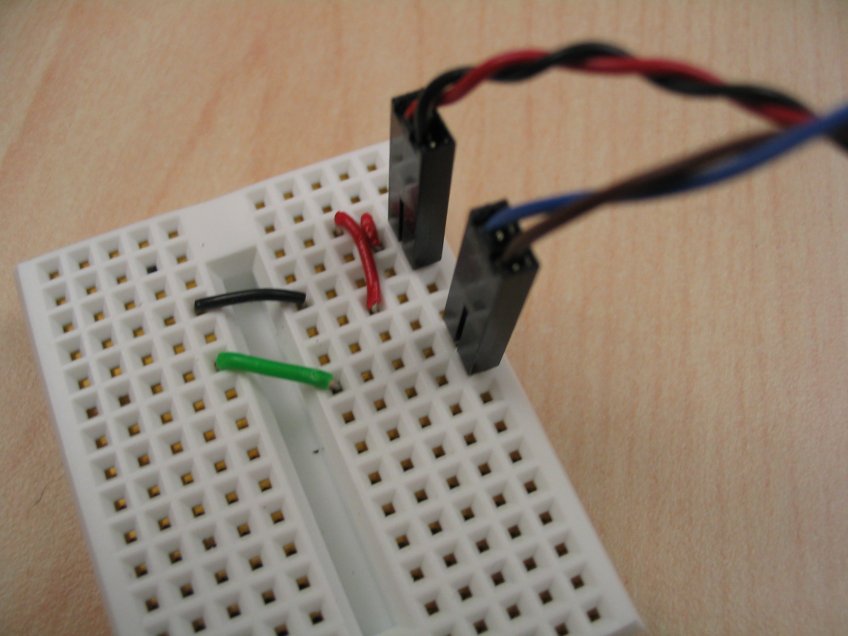
Avant de
passer aux deux problèmes plus bas, il faut placer quelques fils sur
un breadboard. Ces fils seront utilisés pour les deux
problèmes. Par contre, chaque problème complétera le circuit en
rajoutant quelques éléments différents. Trois images montrent
comment placer les fils de base. Les fils rouges devront aller à la
tension d'alimentation (Vcc) et les noirs à la masse (GND). On
reliera donc le câble formé de la paire rouge et noir à une paire
de broches appropriées sur la carte mère. Le fil de données (en
bleu) du câble brun-bleu sera relié à des broches différentes en
fonction du problème. Attention, vous assurez que les languettes de
métal de l’intérieur du breadboard n’aient pas tendance
à ressortir à l’arrière lors de l’insertion des pièces en
surface ce qui risquerait de ne pas établir correctement les
connexions électriques nécessaire au circuit.

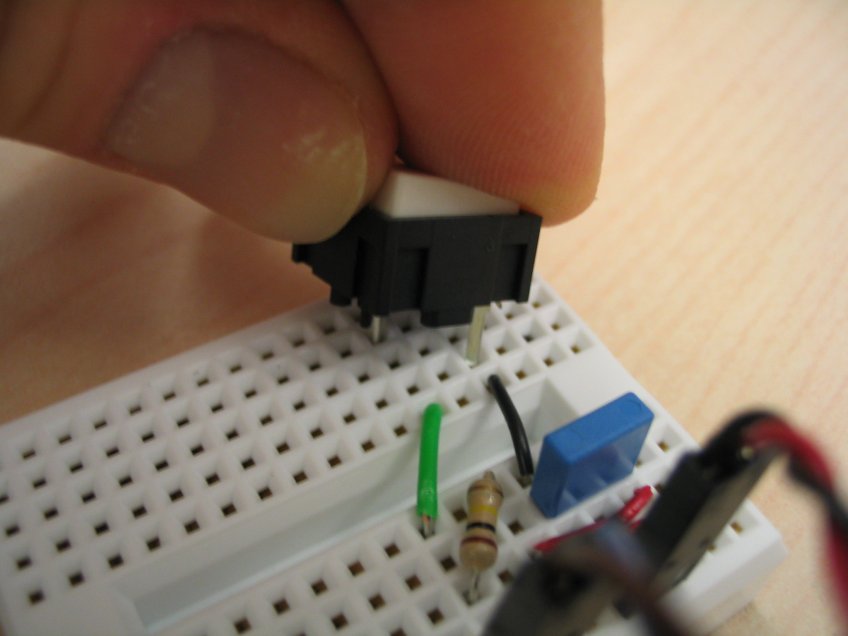
Problème
1
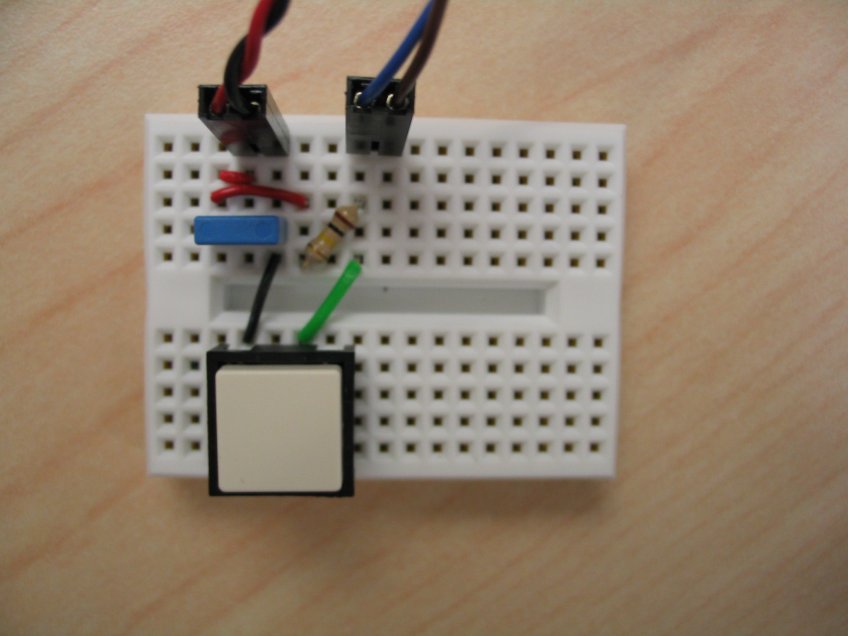
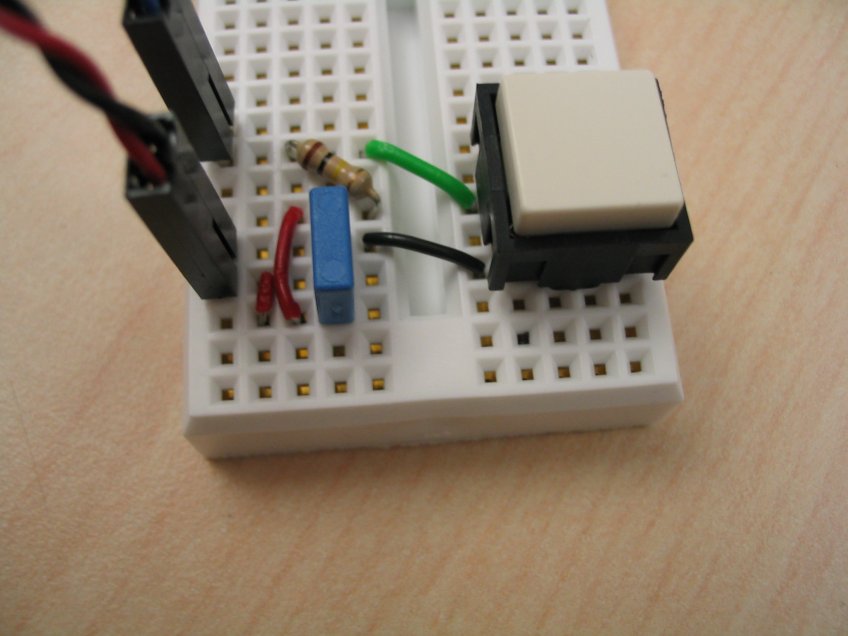
Connectez
un bouton-poussoir blanc (Digi-Key:
EG1328-ND) au breadboard. Bien suivre le détail des photos
pour une insertion correcte. Placez également un petit condensateur
(gris ou bleu) de 0.1 µF (Digi-Key:
BC1621-ND) pour réguler l'alimentation au haut, à gauche. Enfin,
insérer une résistance de 100K (brun-noir-jaune) (Digi-Key:
S100KQTR-ND) un peu plus à droite.
Dans ce
circuit, lorsque le bouton-poussoir est relâché, aucun courant ne
peut circuler et la tension sur le signal de sortie (bleu ou vert))
est Vcc. Lorsqu'on appuie sur le bouton, le circuit est fermé et la
résistance de 100K limite le courant. Le signal de sortie passe à
0 volt. Connectez le signal de sortie au port PD2 de la carte mère.
Attention, le cavalier IntEN doit donc être retiré pour
éviter que le bouton-poussoir Interupt de la carte mère
vienne créer un conflit. Il est absolument nécessaire
d'utiliser ce bouton-poussoir blanc sur le breadboard
pour résoudre le problème. Celui sur la carte mère doit
demeurer inactif. On vous demande aussi de relier votre DEL libre à
B0-B1.
Quand le
bouton est enfoncé, un compteur qui incrémente 10 fois par seconde
est activé. Quand le bouton est relâché ou lorsque le compteur
atteint 120, la lumière clignote vert pendant 1/2
seconde. Ensuite, la carte mère ne fait rien. Puis, deux secondes
plus tard, la lumière rouge s'allume. Elle devra clignoter
(compteur / 2) fois au rythme de 2 fois par seconde. Ensuite, la
lumière tourne au vert pendant une seconde. Finalement, elle
s'éteint et le robot revient à son état original.
Il n’y
a pas beaucoup d’avantage à refaire l’exercice dans SimulIDE
puisqu’on a déjà travaillé avec des interrupteurs dans le
simulateur. Ici, c’est davantage l’aspect matériel sur le robot
qui est important.
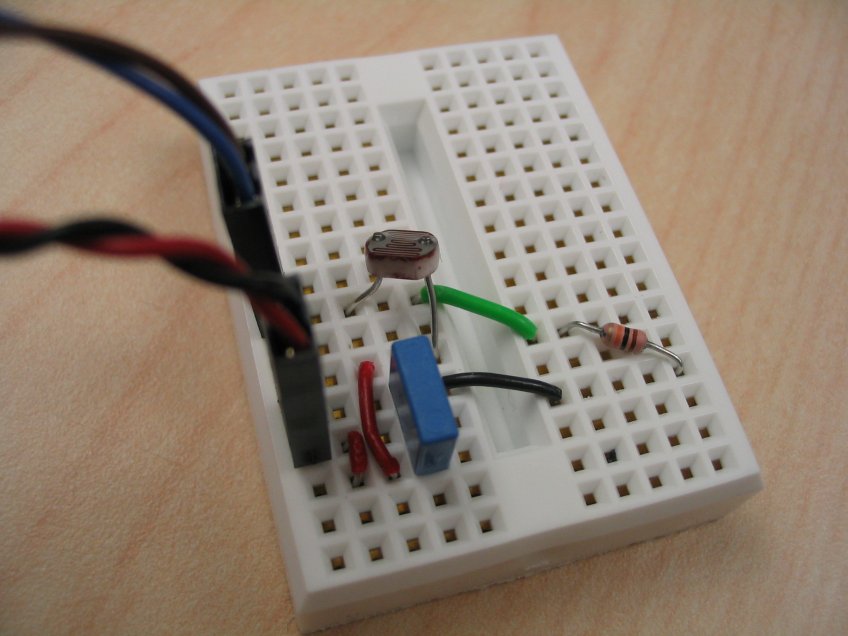
Problème
2
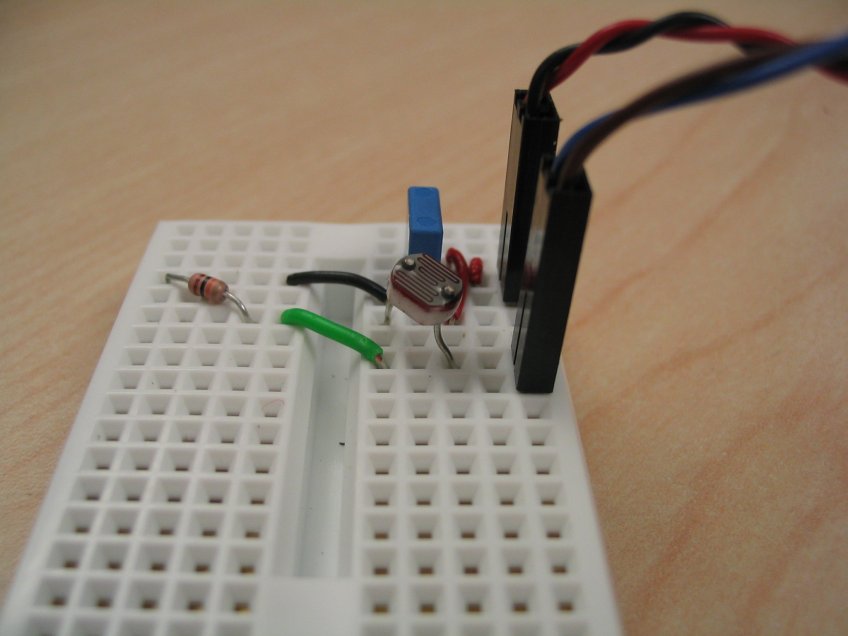
Retirez
le bouton-poussoir et la résistance de 100K du montage du problème
précédent. Insérez une résistance de 10K (brun-noir-orange)
(Digi-Key: S10KQTR-ND) à l'endroit où le bouton-poussoir était.
Placez la photorésistance (Digi-Key: PDV-P8101-ND) où la
résistance de 100K était précédemment. Reliez le fil de données
à un port analogique de votre choix (de PA0 à PA7).
La
photorésistance est une résistance qui varie (de 4K à 11K dans le
présent) en fonction de l'intensité lumineuse. On l'a placée ici
en série avec une résistance de 10K. La tension au point de
contact entre ces deux résistances variera donc en fonction de la
lumière. On peut mesurer cette tension avec le convertisseur
analogique/numérique du microcontrôleur. On peut aussi l'évaluer
avec le multimètre lors de la mise au point pour être bien certain.
La
valeur retournée par le convertisseur est de 10 bits. Par contre,
les derniers 2 bits sont sûrement sans signification et peuvent donc
être négligés ce qui permet de réduire le format des données à
8 bits. Le traitement des données s'en trouvera simplifié.
Utiliser le port A0 pour effectuer vos conversions. On vous demande
aussi de relier votre DEL libre à B0-B1.
Dans
SimulIDE, il existe une
photorésistance qu’on peut monter avec une résistance en série
de la même façon que sur le breadboard.
La tension au point de contact entre ces deux résistances variera
donc en fonction de la lumière. On peut mesurer cette tension avec
le convertisseur analogique/numérique du microcontrôleur. On
pourra
aussi l'évaluer avec le multimètre virtuel
lors de la mise au point pour
être bien certain du matériel
avant de passer à l’écriture du logiciel.
Il faudra aussi placer une
source de lumière virtuelle, qui est une ampoule et qui est aussi
une composante de SimulIDE. Voici donc les deux nouvelles
composantes si vous voulez
faire l’exercice aussi avec le simulateur.
Toutefois, il est impératif
de faire l’exercice d’abord
avec la carte et le breadboard.

Une
classe (can.h
et can.cpp)
permet le contrôle du convertisseur analogique/numérique. Référez
à la documentation d'Atmel pour bien comprendre le fonctionnement de
ce périphérique interne. De plus, vous devrez ajuster la référence
analogique à +5.0 volts pour cet exercice. Concrètement, il faut
ajuster le potentiomètre de manière à régler le voltage de sortie
du diviseur de tension sur la carte mère pour que la broche 32
(AREF) du ATmega324PA soit à 5 volts. Il vous faudra donc utiliser
le multimètre et votre petit tournevis à tête plate pour y
arriver. L’alimentation de
la carte peut difficilement se faire par le câble USB dans ce cas,
car la tension fournie par l’USB est inférieure à 5 volts. Il
vaut mieux utiliser la source de tension au laboratoire (ou, au pire,
une pile rectangulaire 9 volts) pour alimenter la carte.
De plus,
vous devrez ajuster la référence analogique à +5.0 volts pour cet
exercice. Sur la carte mère, il faut ajuster le potentiomètre de
manière à régler le voltage de sortie du diviseur de tension pour
que la broche 32 (AREF) du ATmega324PA soit à 5 volts. Il faut donc
utiliser le multimètre et un petit tournevis à tête plate pour y
arriver.

Avec
SimulIDE, il y a quelques façons de parvenir à cet ajustement, mais
le mieux est d’ajouter quelques composantes pour arriver à une
réalité plus près de ce qui est en place sur la carte mère, pour
conserver un parallèle entre les deux. On peut donc y aller avec ce
qui suit :

Arrivons
à l’exercice lui-même enfin! Faire un robot pouvant se faire
bronzer...
Si la
lumière est basse (en cachant la photorésistance), la DEL prendra
la couleur verte.
Si la
lumière est à un bon niveau (lumière ambiante), la DEL tournera à
l'ambré.
Si la
lumière est trop forte (photorésistance sous une lampe de poche),
la DEL devient rouge.
Questions
intéressantes à vous demander...
Avec
un CAN de 10 bits, combien de valeurs possibles peut-on représenter?
Si
Vref = 5 volts et Vgnd = 0 volt, que donnera le CAN à 2.65 volts?
Proposez
une architecture logicielle où l'on prend des valeurs d'un CAN et
où on les enregistre en mémoire. Comment enregistrerait-on des
valeurs de 10 bits dans une mémoire de 8 bits?
Proposez
des méthodes permettant d'enregistrer plus de données de 10 bits
dans les 64K de mémoire.
Qualité
du code
La règle
43 porte sur la conversion explicite de type et est à regarder. La
50 est sur la durée de vie des variables. Enfin, les règles 51 et
52 sont sur l’initialisation de variables utilisées dans des
boucles.
Soumission
du programme
Ces
deux programmes seront corrigés. Ils devront être placés dans
votre entrepôt Git. Pour faciliter la correction, les programmes
devront être dans un répertoire précis et être accompagnés d'un
Makefile. XY est votre
numéro d'équipe. Vous pouvez nommer les fichiers de la façon que
vous le désirez à l'intérieur des deux répertoires suivants, tant
que le code peut être compilé avec la commande «make»:
https://githost.gi.polymtl.ca/git/inf1900-XY/tp/tp6/pb1/
https://githost.gi.polymtl.ca/git/inf1900-XY/tp/tp6/pb2/
Il
faut se souvenir que Linux est sensible à la casse (case
sensitive)
et que les chemins précédents doivent être exacts. De plus, il
faudra placer sous Git
les fichiers can.h
et can.cpp
pour que le code puisse être compilé correctement. Il est possible
que vos fichiers soient directement annotés par les chargés de
laboratoire durant la correction. Un fichier correction.txt
sera
placé dans le répertoire tp6
lorsque la correction sera terminée. Les
programmes seront corrigés selon le barème
de la section évaluation du site web.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}