INF1900
Projet
initial de système embarqué
Travail
pratique No. 5
Mémoires
et protocoles de communication
Objectif:
Comprendre l'accès à une
mémore et la communication par protocole
RS232
Durée:
Une semaine
Travail
préparatoire: Aucun
Documents
à remettre: Aucun, mais le travail pour ce laboratoire sera
repris pour le travail pratique 9.
Présentation
en classe: fichier
PowerPoint
"Finalement
tout se connecte – Les gens, les idées, les objets. La
qualité des connexions est la clé
de la qualité en soi."
"Les
détails ne sont pas les détails. Ils font la conception."
|
-
|
Charles
Eames
|
Introduction
La
semaine dernière, nous avons regardé l'ensemble des différents
types de mémoire à l'intérieur même de l'AVR. En particulier,
nous nous sommes attardés à l'utilisation de certains registres en
mémoire pour accéder aux ressources internes disponibles. Les
mémoires internes sont de plusieurs types et contrôlent à peu près
tout le fonctionnement du microcontrôleur. Par contre, leur accès
est grandement facilité par l'utilisation de mnémoniques dans le
code et du fait que le manufacturier peut s'organiser pour faciliter
l'adressage à l'intérieur même du circuit. Il en va autrement
lorsque la mémoire se situe à l'extérieur du circuit. Il faut
alors bien définir les signaux de contrôle et de données entre le
microcontrôleur et la mémoire externe. De plus, les délais doivent
être pris en considération pour synchroniser correctement les
opérations entre les deux puces.
Il
est important de constater que la majorité des petits systèmes
embarqués n'ont pas toujours de disque dur ou d'accès à un réseau
pour échanger ou stocker des données. Les mémoires deviennent donc
des éléments importants, surtout pour l'ingénieur informaticien
qui aborde le design de tels systèmes par les questions logicielles
plutôt que par les aspects électriques ou mécaniques. De plus,
l'établissement de ce qui est adressable, et de quelle façon, est
souvent au coeur des premières ébauches avec le reste de l'équipe
de développement (voir le livre de Michael
Barr, Programming Embedded
Systems in C and C++, en
référence).
Comme
on ne fait ici qu'un survol, et que de toute façon la technologie
des mémoires évolue très rapidement, on ne peut se permettre de
couvrir tous les aspects de ce vaste sujet. Il est tout de même
nécessaire de revenir sur certains concepts de base.
Traditionnellement,
les mémoires ont été divisées en deux grandes catégories, les
mémoires vives et les mémoires mortes. Cette division devient de
plus en plus floue puisque les méthodes d'écriture et la
persistance des données sont plus nombreuses et variées qu'à une
certaine époque.
Les
mémoires vives sont celles qui perdent leur contenu si le circuit
n'est pas alimenté. On distingue les mémoires vives statiques et
dynamiques. Les mémoires dynamiques nécessitent un circuit complexe
qui rafraîchit leur contenu de façon périodique puisqu'elles
tendent à se décharger rapidement. Par contre, elles peuvent
stocker des quantités impressionnantes de données. Les mémoires
vives statiques ne nécessitent pas de circuit de rafraîchissement.
Elles sont par contre chères, quoique de moins en moins. Le fait
qu'elles puissent être accédées très rapidement en fait de bonnes
candidates pour former de la mémoire cache. Les progrès
technologiques feront-ils en sorte que les mémoires dynamiques (et
donc les barrettes de mémoire de nos PC) vont graduellement
disparaître ?
EEPROM,
interne et externe
Les
mémoires mortes ont subi une plus grande évolution au cours des
dernières années. De la traditionnelle mémoire ROM
que l'on «brûle» une seule fois, on a commencé par permettre la
réécriture dans ce type de mémoire selon diverses technologies. La
première évolution a vu l'utilisation d'ultraviolets pour effacer
le contenu avant de permettre la réécriture par tension élevée
(12 volts et parfois même plus). Puis, on a permis l'effacement et
la réécriture de façon entièrement électrique (Electrically
Erasable Programmable Read-Only Memory
- EEPROM).
C'est ce type de mémoire qui sera utilisé pour ce laboratoire, même
en simulation. Une technologie
assez différente est arrivée ces dernières années avec les
mémoires de type flash.
D'un point de vue de sa conception, ce type de mémoire fait partie
des EEPROM. Les différences viennent du fait que la mémoire flash
est plus rapide d'accès alors que les EEPROM peuvent subir un plus
grand nombre de réécritures. L'accessibilité
à plusieurs zones de
mémoire a aussi grandement favorisé l'utilisation des mémoires
flash.
Une
autre façon de classer les mémoires est par les méthodes d'accès,
soit série, soit parallèle. Accéder à une mémoire par un
protocole série demande moins de broches et prend donc moins de
place dans un circuit. Le protocole d'accès peut cependant être
plus complexe étant donné qu'il faut souvent envoyer l'adresse en
premier, suivie de la donnée, et ce, bit par bit. Un protocole
parallèle est plus simple puisqu'on peut compter sur des bus
d'adresse et de donnée ce qui implique moins d'étapes lors de
l'accès. Par contre, il peut y avoir plus de traces de métal sur la
carte mère.
La
mémoire externe sur notre circuit de
la carte mère utilisée en laboratoire sur
la carte mère n'a
que 8 broches et doit donc être accédée
avec un protocole série. Le protocole utilisé ici s'appelle I²C
(ou 2-Wire,
appelé aussi TWI par Atmel). D'autres protocoles série sont aussi
répandus. Mentionnons simplement le protocole SPI (Serial
Peripheral Interface). Ce
protocole est aussi appelé 3-wire par certains manufacturiers. Il
faut dire que beaucoup d'autres types de périphériques peuvent être
accédés via ces protocoles, et non pas seulement des mémoires.
Évidemment, d'autres protocoles sont plus connus (comme l’USB)
parce qu'ils sont employés dans les PC ou des systèmes courants,
mais ils sont plus complexes.
Alors,
comment choisir la mémoire appropriée? La réponse variera beaucoup
en fonction du système à concevoir. Les systèmes opérants en
temps réel et qui demandent beaucoup de calculs pourront être très
gourmands en mémoire statique dispendieuse. À l'autre extrême, il
faut parfois stocker quelques octets seulement (comme le numéro de
série, le numéro de révision du micrologiciel (firmware),
un code d'accès spécial, etc..) dans des mémoires très petites.
Entre ces extrêmes, toutes les situations sont possibles. Le coût
est aussi un grand facteur. La petite mémoire de 512Kbits (65536
octets X 8 bits) sur notre
carte mère habituelle
coûte
environ $3.00.
Sa fiche
technique peut être consultée par simple curiosité. Cette
mémoire est également disponible comme composante à l’intérieur
de SimulIDE, mais un bogue connu depuis un certain temps fait qu’on
ne pourra pas
l’utiliser en simulation. Le
ATmega324 contient cependant une mémoire EEPROM interne qui pourra
être utilisée à la place
si on le souhaite même si ce n’est pas ce qu’on va faire comme
travail cette semaine.
Cette mémoire est seulement de 1K octets (1024 octets) ce qui est
très peu.
Cette mémoire étant une ressource
interne de l’AVR fait qu’elle est aussi prise en charge par la
librairie AVRLibC dans la section
sur la gestion des EEPROM. Presque tous les AVR ont une petite
mémoire interne de ce type qui conserve ses données même lorsque
l’alimentation est coupée. J’aime cependant la façon de voir
de ce
site qui présente les choses assez simplement. Il y a trois
fonctions de base: eeprom_read_*,
eeprom_write_*
et eeprom_update_*
pour lire ou écrire des informations. Ici, update
est une variante de write
qui n’effectue l’écriture que si la valeur à inscrire
diffère de celle déjà présente dans la mémoire même si cette
vérification prend plus de temps
qu’une écriture normale. Il
faut comprendre que physiquement, un tel type de mémoire peut subir
un nombre limité d’écritures avant de commencer à se détériorer.
On peut donc vouloir l’utiliser dans certaines situations où
l’usure de la composante doit être prise en compte. Dans un
simulateur, une composante n’use pas! On pourra donc finalement
utiliser seulement les read
et write.
Chaque fonction de base dans #include
<avr/eeprom.h> s’applique
aussi à divers types: byte, word, dword, float et block ce qui
correspond respectivement à des valeurs de 8 bits, 16 bits, 32 bits,
32 bits et d’un
bloc d’octets de longueur spécifiée en paramètre de fonction.
Il
faut cependant garder en tête que le EEPROM reste une mémoire
périphérique aux mémoires flash (pour le programme) et RAM (pour
les données). Son usage est d’ailleurs optionnel. Par contre,
elle peut être considérée aussi comme un périphérique
puisqu’elle possède des registres qui contrôlent son
fonctionnement. Une programmation plus bas niveau permet d’ailleurs
un usage plus sophistiqué comme le montre bien cet
exemple. Par contre, en général, et comme on le fera pour ce
laboratoire, l’usage de la librairie AVRLibC rend le travail
vraiment plus simple et fait qu’on peut y lire et y écrire des
valeurs avec quelques appels de fonctions, tout simplement.
Le
simulateur SimulIDE permet de charger directement des valeurs dans le
EEPROM du ATmega324a. Il faut faire un clique-droit de la souris sur
la puce et choisir dans le menu déroulant l’option «Load EEPROM
data». Le problème est qu’il faut fournir par la suite un
fichier au format capricieux et ça n’a jamais vraiment bien
fonctionné non plus. On peut par contre obtenir le contenu de la
mémoire avec l’option complémentaire «Save EEPROM data». Même
si la mémoire est vide (souvent les valeurs sont alors toutes à
255), on peut alors sauvegarder le résultat dans un fichier à
l’extension *.data. Ceci permet alors de visualiser ce fichier
texte dans un éditeur ou avec la commande Linux cat
(ou more, less,
etc.) et donc d’en comprendre la syntaxe. Lorsqu’on travaille
avec des entiers entre zéro et 255 et qu’on veut pouvoir repérer
des caractères au travers d’une série de valeurs, il est pratique
d’avoir une table
ASCII à porter de la main. L’expérience globale avec
SimulIDE reste tout de même décevante avec les EEPROM, internes ou
externes.
Il
nous faudra donc travailler avec la mémoire externe I²C
de la carte mère. L'étude du protocole I²C
permettant l'accès à la mémoire n'est pas un objectif direct du
projet. C'est pourquoi nous vous fournissons une classe en C++ qui
gère toutes les opérations mémoire. Vous pourrez regarder le code
pour satisfaire votre curiosité si bon vous semble. Nous décrirons
ici uniquement l'interface de programmation telle que présentée
dans le fichier memoire_24.h.
Le protocole I²C,
et donc l’accès à la mémoire)
réclame l’utilisation des broches C0 et C1 (les deux premiers bits
du port C autrement dit)
et un cavalier (jumper)
sur MemEN sur la carte mère pour les
opérations d’échanges de données.
Cette
classe se nomme Memoire24CXXX et son constructeur n'a besoin d'aucun
argument. Ce constructeur appelle lui-même la procédure init
de telle sorte que vous ne devriez jamais avoir besoin de le faire
puisqu'il n'y a aucune raison pour réinitialiser le bus I²C (ce ne
serait pas le cas si vous aviez plus d'un périphérique I²C à
contrôler). L'écriture peut se faire de deux façons. Un octet seul
peut être écrit en précisant sa valeur et son adresse. Une autre
possibilité est d'écrire un bloc d'octets (n'excédant pas 127)
d'un seul coup en commençant à l'adresse spécifiée. La lecture se
fait d'une manière similaire. On peut lire un octet à la fois ou en
passant un vecteur de longueur précise pour lire un bloc continu.
class
Memoire24CXXX
{
public:
//
Le constructeur appelle init() décrit plus bas
Memoire24CXXX();
~Memoire24CXXX();
//
Procédure d'initialisation appelée par le constructeur
//
Donc, ne pas le refaire à moins de changements en cours
//
d’utilisation.
void
init();
//
La procedure init() initialize à zéro le "memory bank".
//
Appeler cette methode uniquement si l'adresse doit changer
static
uint8_t choisir_banc(const uint8_t banc);
//
Deux variantes pour la lecture:
//
une valeur à la fois
uint8_t
lecture(const uint16_t adresse, uint8_t *donnee);
//
bloc de donnees : longueur doit être de 127 et
moins
uint8_t
lecture(const uint16_t adresse, uint8_t *donnee,
const
uint8_t longueur);
//
Deux variantes pour l'écriture:
//
une valeur à la fois
uint8_t
ecriture(const uint16_t adresse, const uint8_t donnee);
//
bloc de donnees : longueur doit être de 127 et
moins
uint8_t
ecriture(const uint16_t adresse, uint8_t *donnee,
const
uint8_t longueur);
private:
//
pour l'écriture, mais privée à la classe
uint8_t
ecrire_page(const uint16_t adresse, uint8_t *donnee,
const
uint8_t longueur);
private:
//
données membres de la classe
static
uint8_t m_adresse_peripherique;
const
uint8_t PAGE_SIZE;
};
Voici les fichiers permettant
l'accès à la mémoire: memoire_24.h
et memoire_24.cpp.
Il suffira d'ajuster votre Makefile pour les compiler avec votre
code. Comme la mémoire sera utilisée, il faut qu'un cavalier soit
présent sur MemEN.
RS232
Le bon
vieux protocole de communication RS232 ne veut pas mourir... Les
microcontrôleurs récents tendent à avoir des U(S)ART (Universal
(Synchronous and) Asynchronous Reciever Transmetter) intégrés pour
faciliter la communication RS232. Un U(S)ART est toujours basé sur
un registre à décalage, le plus souvent de 8 bits. Comme
l'information est envoyée bit par bit sur la ligne Tx du câble, le
registre à décalage, tant en réception qu'en émission, devient
l'élément électronique fondamental des équipements supportant le
RS232.
Le RS232
est un protocole de communication fort simple comparé à des
protocoles plus complexes comme l'USB. Dans notre cas, il nous
servira surtout de façon sporadique pour aider au déverminage. Les
exercices de ce travail pratique doivent donc être vus comme du code
que vous pourrez réutiliser lors de la mise au point de programmes à
venir. On ne fera que recevoir quelques octets sans procédure de
contrôle complexe.
Le
site Wikipédia donne une bonne explication
du RS232 qui est suffisante même si la version anglaise du site
offre plus
de détails. Dans la plupart des cas, les données qui sortent
d'un USART passent par un circuit qui fait simplement ajuster la
tension des signaux à -12 et +12 volts. Un connecteur de type DB9
ou DB25 permet également de faire cheminer les signaux dans un câble
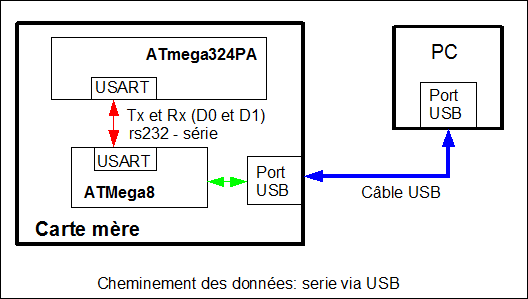
contenant quelques fils. Sur la carte mère normalement
utilisée en laboratoire,
pour éviter l'ajout de ce circuit qui ajuste la tension et d'un
connecteur DB9, on redirige les données via le port USB. De cette
façon, on réduit la taille de la carte et toute la communication se
fait par un seul câble comme le montre la figure. Le ATMega8
effectue la conversion de protocoles entre le RS232 et l'USB. Le
code évoluant sur le ATmega324PA n'a pas à se soucier de cette
redirection par l'USB. En effet, le même code pourrait servir dans
un système avec communication directe vers un PC par câble RS232.
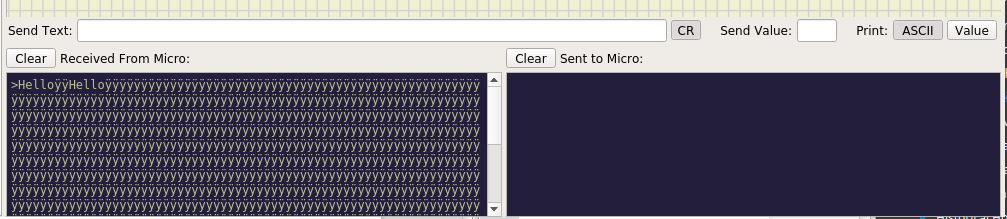
SimulIDE
permet deux formes de support pour le RS232. Les deux modes sont
accessibles par un clique-droit sur le microcontrôleur dans la
simulation dans le menu déroulant qui apparaît. Le premier, «Open
Serial Port», permet de connecter un vrai lien sériel sur le PC
avec le USART0 virtuel du simulateur! C’est un peu curieux à
première vue, mais il peut être très intéressant d’utiliser le
simulateur avec un vrai périphérique et des données qui
proviennent d’un contexte réel simplement pour voir comment ça se
passe. On n’utilisera pas cette option en laboratoire. On
utilisera plutôt tout en virtuel avec l’option «Open Serial
Monitor» qui ouvre directement une «console» vers le USART0
virtuel. Cette console devient donc le terminal qui communique
directement en utilisant le protocole RS232. Ainsi, on peut envoyer
directement des chaînes de caractères, ou en recevoir, à travers
l’interface qui apparaît alors au bas de la fenêtre de
simulation. Il devient possible d’envoyer des valeurs (ASCII ou
numériques). Cette console permet aussi de voir ce qui est reçu de
la simulation par RS232 et même d’avoir une confirmation de ce qui
a été envoyé. Cependant, comme le laboratoire utilise la mémoire
de la carte mère, il est impératif de faire l’exercice de RS232
aussi avec la carte mère.
Problèmes
Problème
1: lecture et écriture en mémoire externe
Vous
devrez faire un programme qui écrit la chaîne de caractères «
*P*O*L*Y*T*E*C*H*N*I*Q*U*E* *M*O*N*T*R*E*A*L*» suivi d'un
0x00 en mémoire externe du ATmega324PA. La chaîne commencera à
l'adresse 0x0000 (sur 16 bits, donc). Faire en sorte que votre
programme puisse aller relire la chaîne en question. Comparez la
chaîne de caractères envoyée à la mémoire et celle relue. Il
suffira de faire afficher une DEL en vert si elles sont identiques et
en rouge dans le cas contraire. Utiliser les ports que vous voulez
pour connecter cette DEL. Cette démarche est un peu douteuse au
départ, mais elle se raffinera avec le problème 3. Il faut prévoir
un délai de 5 ms après l'écriture d'un octet en mémoire et
l'accès suivant à la mémoire. De cette façon, la mémoire peut
compléter son cycle d'écriture sans problème. Aucun besoin
d’utiliser le RS232 ici. On veut simplement maîtriser la mémoire
externe dans un premier temps.
Problème
2: Communication RS232
Placer
le cavalier DbgEN (mode actif). Les broches D0 et D1 du USART0 du
ATmega324PA seront reliées au USART du ATMega8. La communication se
fera à 2400 bauds, sans parité et les trames de 8 bits seront
séparées par un bit d'arrêt. Du côté PC, vous n'avez pas à
prendre ces détails en considération. Un petit programme, écrit
spécifiquement pour ce cours, ajustera ce qu'il faut pour vous. Ce
programme redirige les caractères ASCII affichables à l'écran (ou
dans un fichier avec l'option -f). Il suffit de l'invoquer avec
l'option de lecture:
Notez
que le programme serieViaUSB bloquera tout simplement jusqu'à ce que
des octets lui parviennent. Par contre, il affichera à l'écran les
octets dès qu'ils arriveront sans autre commande de votre part. Il
est fortement suggéré de taper la commande serieViaUSB avec
l’option «-h» pour voir d’autres options intéressantes comme
c’est souvent le cas pour plusieurs commandes sous Linux. Et
pourquoi pas en essayer justement quelques options ou combinaisons
d’options en effectuant le travail ?
Pour ce
qui est du code, la documentation de Atmel donne les procédures
d'initialisation, de transmission et de réception. C'est le bon
temps de copier sans sentiment de culpabilité! Il vous faudra
peut-être ajuster quelques registres tout au plus:
void
initialisationUART ( void ) {
//
2400 bauds. Nous vous donnons la valeur des deux
//
premiers registres pour vous éviter des complications.
UBRR0H
= 0;
UBRR0L
= 0xCF;
//
permettre la réception et la transmission par le UART0
UCSR0A
= 'modifier ici' ;
UCSR0B
= 'modifier ici' ;
//
Format des trames: 8 bits, 1 stop bits, sans parité
UCSR0C
= 'modifier ici' ;
}
Il en va
de même pour la procédure qui envoie un octet de la carte vers le
PC. Il suffit de la trouver dans la fiche technique du ATmega324PA.
//
Du USART vers le PC
void
transmissionUART ( uint8_t donnee ) {
'modifier
ici'
}
Le
chargé de laboratoire s'assurera que votre carte peut afficher à
l'écran avec ce qui suit:
char
mots[21] = "Le robot en INF1900\n";
uint8_t
i, j;
for
( i = 0; i < 100; i++ ) {
for
( j=0; j < 20; j++ ) {
transmissionUART
( mots[j] );
}
}
Compiler
votre code et le charger sur le microcontrôleur. Observer si le
programme serieViaUSB affiche les octets à l'écran. Il n'est pas
nécessaire de redémarrer le programme serieViaUSB à répétition
pour réinitialiser la communication puisqu'il continuera toujours
d'afficher à l'écran les octets qu'il reçoit sur le port RS232
sans se soucier d'une quelconque forme de protocole. Par contre, il
peut être intéressant de presser le bouton de remise à zéro sur
la carte mère pour redémarrer votre programme quelques fois de
suite pour tester si la communication avec quelques séquences de
suite se passe bien.
Problème
3: De la mémoire vers le PC par RS232
Avec
le code utilisé pour l'exercice précédent, transmettre les valeurs
inscrites en mémoire vers le PC. On aura
encore besoin ici du programme serieViaUSB
du côté Linux pour afficher
le contenu de la mémoire eeprom
externe dès que
le programme démarre.
Cette mémoire sera lue de l'adresse 0x0000 jusqu'à ce qu'une
valeur lue soit égale à 0xFF. Vous pouvez jouer un peu avec ce que
vous choisissez d’écrire en mémoire, bien entendu.
Question
intéressante
Dans le
cas du problème 2, combien de cycles d'horloge se produisent entre 2
caractères transmis. Serait-il mieux de transmettre par le port
RS232 en contrôlant par un mode de scrutation ou d'interruption?
Pourquoi?
Suivi
logiciel
Le code
développé pour résoudre ces problèmes devra être placé dans
votre entrepôt Git. Les noms des fichiers et les répertoires où
ils doivent être placés sont laissés à votre discrétion. Vous
aurez besoin de ce code plus tard dans la session.
Pour
aller plus loin avec le robot...
Généralement,
après six semaines de travail avec le robot, certains étudiants
commencent à développer une passion pour le robot et sa
programmation. De plus, ils sont tentés d'adhérer à une
société technique (La
Formule Polytechnique, la
machine des Jeux de Génie, Esteban,
Oronos,
PolyOrbit,
Exocet,
etc.) Dans bien des cas, les
problèmes électroniques et de programmation à résoudre pour faire
fonctionner nos systèmes
sont un peu les mêmes que ceux que ces clubs peuvent avoir à
résoudre avec leurs propres systèmes. Une
autre option est de s'intéresser à PolyFab.
Le comité
du STEP
est un autre endroit intéressant pour l’implication des étudiants
en informatique et logiciel.
En
discutant avec les gens impliqués dans ces clubs, on se rend compte
qu'on utilise souvent les
mêmes fournisseurs de pièces et les mêmes références de base.
Il s'agit d'un très bon point de départ pour ceux qui désirent
aller plus loin avec un projet similaire (pour un club ou pour
eux-mêmes). Il faut se rendre compte que ces bonnes adresses
offrent des ressources qu'on peut avoir énormément de difficulté à
trouver au coin de la rue... Les concepteurs du robot auraient perdu
moins de temps s'ils avaient eu cette liste beaucoup plus tôt...
Enfin,
pour ceux et celles qui voudraient approfondir leurs connaissances du
fonctionnement du robot lui-même, il y a la
section «fichiers» du site web qui présente l'ensemble des
fichiers ayant servi à la conception du robot (plan, schéma, code
source, etc.) Il faut mentionner que le robot est un projet à code
source ouvert (open source)
et qu'il peut être modifié ou adapté à des projets particuliers
(y compris les projets pour les clubs étudiants). On pourra
remarquer la contribution de quelques étudiants à cette section.
Bien entendu, la complexité technique de ce qui est présenté dans
cette section dépasse largement le cadre du cours INF1900,
mais il s'agit de sujets qui ne sont pas hors de porté pour des gens
ayant le désire d'aller plus loin dans le domaine.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}