INF1900
Projet
initial de système embarqué
Travail
pratique No. 4
Les
registres spéciaux et les périphériques internes
Objectif:
Explorer les ressources internes de l'AVR
Durée:
Une semaine
Travail
préparatoire: Aucun
Documents
à remettre: Aucun fichier à remettre. Par contre, il s'agit
d'un laboratoire sujet à un quiz prochainement et le code développé
pour ce laboratoire pourra être réutilisé assez directement pour
le fonctionnement du système finale.
Présentation
en classe: fichier
PowerPoint
«L'ordinateur
obéit à vos ordres, pas à vos intentions»
|
-
|
Anomyme
|
Introduction
Jusqu'ici,
le projet a permis d'explorer le fonctionnement des ports du
microcontrôleur et de la carte mère en général. Il est
maintenant temps de regarder d'un peu plus près les ressources
internes de l'AVR, spécialement celles qui nous seront utiles pour
contrôler le robot.
Les
microcontrôleurs AVR disposent de plusieurs éléments de contrôle
à l'intérieur même de la puce. La plupart de ces sous-systèmes
peuvent être configurés et utilisés par des registres spéciaux
placés à des adresses précises en mémoire. L'ajout de tels
dispositifs matériels permet de leur déléguer certaines
responsabilités et de libérer l'unité centrale pour lui permettre
de faire d'autres traitements. Par contre, ces nouveaux
périphériques internes doivent être gérés correctement et l'on
doit toujours garder à l'esprit qu'ils travaillent en parallèle
avec le reste du système. La synchronisation des activités devient
donc importante.
Pour
entreprendre cette étape, nous ferons un survol des mémoires et des
périphériques internes de l'AVR. Pour les détails, il vous faudra
lire la documentation du ATmega324PA de toute façon. Par la suite,
vous referez certains exercices effectués durant les semaines
précédentes, mais en réutilisant cette fois les ressources
internes dédiées pour arriver aux mêmes résultats. Il y aura
aussi des exercices qui introduiront de nouveaux concepts.
Cependant, il faudra commencer par une présentation des mémoires de
l'AVR puisqu'il s'agit probablement du meilleur point de départ pour
arriver à saisir l'interaction avec les périphériques internes.
Mémoires
de l'AVR ATmega324PA
Il y a 3
mémoires principales dans le microcontrôleur utilisé, soit la
mémoire de programmation de type flash, la mémoire vive (RAM)
et la mémoire morte (ROM). Chaque mémoire est indépendante
des autres et est adressable séparément. La première est celle où
le programme réside. Depuis le début du projet, c'est elle qui
héberge vos programmes. Comme vous l'avez déjà utilisée depuis
quelques semaines, il ne reste pas énormément de détails à
ajouter sur cette mémoire de programmation. Le fait d'avoir une
zone séparée pour loger le programme à exécuter permet
l'utilisation d'une technologie spécifique de mémoire qui ne
s'efface pas facilement. Ainsi, le programme peut résider longtemps
à l'intérieur du circuit, et ce, même si l'alimentation est
coupée, sans devoir être rechargé à chaque démarrage du
microcontrôleur. Les ordinateurs PC procèdent de façon totalement
différente et chargent les programmes constamment en mémoire vive.
Mais les PC viennent avec un disque dur interne ce qui n'est pas le
cas de notre carte mère...
Le
second type de mémoire de l'AVR est une mémoire morte à laquelle
on peut accéder par des instructions spéciales pour contenir des
données pour une longue période de temps. Elle ne sera pas
utilisée durant le cadre du projet puisqu'on lui préférera la
mémoire externe disponible sur la carte mère et qui sera introduite
la semaine prochaine. Il ne reste donc qu'à parler de la mémoire
vive. On dit mémoire vive, mais en fait, il y a trois sections
distinctes dans cet espace adressable comme le montre la figure
ci-dessous tirée du livre de Christian Tavernier «Microcontrôleur
AVR - Description et mise en oeuvre» (voir la section références).
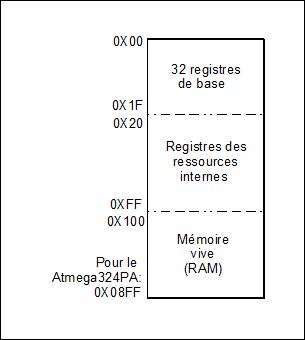
Section
de la mémoire vive du ATmega324PA
Comme on
peut le voir, les registres de travail du processeur, au nombre de 32
(soit de 0 à 31 - 0x1F en hexadécimal), font partie de la mémoire
vive! C'est une caractéristique assez particulière de la série
AVR. La section suivante est réservée pour les registres spéciaux.
Enfin, la dernière section est la «vraie» mémoire vive à usage
général au sens où on l'entend le plus couramment. En réalité,
du point de vue de la programmation, des mnémoniques sont associées
aux adresses mémoires des deux premières sections. Ce que cette
organisation signifie est que vous n'avez pas vraiment à savoir les
détails précis des adresses des deux premières sections puisque
vous y accéderez plutôt avec des noms de registres. Vous direz,
par exemple, pour accéder au registre d'état (Status REGister):
uint8_t
gMaChereVariable = SREG ;
En
réalité, ce registre se situe dans la mémoire vive à l'adresse
0x3F, mais vous n'avez pas besoin d'en tenir compte. Si cette façon
de voir vous déplaît, vous pouvez aussi considérer que la mémoire
vive n'est constituée pratiquement que de la dernière section et
que celle-ci commence à l'adresse 0x100. Une façon encore plus
simple de voir la chose est de se dire que le compilateur verra
lui-même à gérer l'utilisation des registres de base de même que
de la dernière section de la mémoire vive et que nous accéderons
aux registres spéciaux de la deuxième section par leur nom dans nos
programmes tout simplement! Ces précisions devraient vous permettre
de lire la documentation plus facilement sans trop vous perdre dans
des détails utiles uniquement pour une utilisation spécialisée du
microcontrôleur ou lorsque la programmation est en langage
d'assemblage.
Les
ressources internes, les interruptions et la scrutation
La
figure suivante montre l'architecture interne de l'AVR (également
tirée du livre de Christian Tavernier). Comme on peut le voir, la
partie de gauche est semblable à ce qu'on peut trouver pour
n'importe quel processeur avec un fichier de registres et une unité
arithmétique et logique (UAL, ALU en anglais). Par contre,
dans la section de droite, on peut voir certains blocs de
périphériques. Dans le cadre du projet, nous aurons surtout besoin
des minuteries (timers) et du UART. Plus tard, nous aurons
aussi besoin du convertisseur analogique/numérique. Nous décrirons
ici en quelques lignes les ressources utiles, mais il convient
d'abord de parler des interruptions.
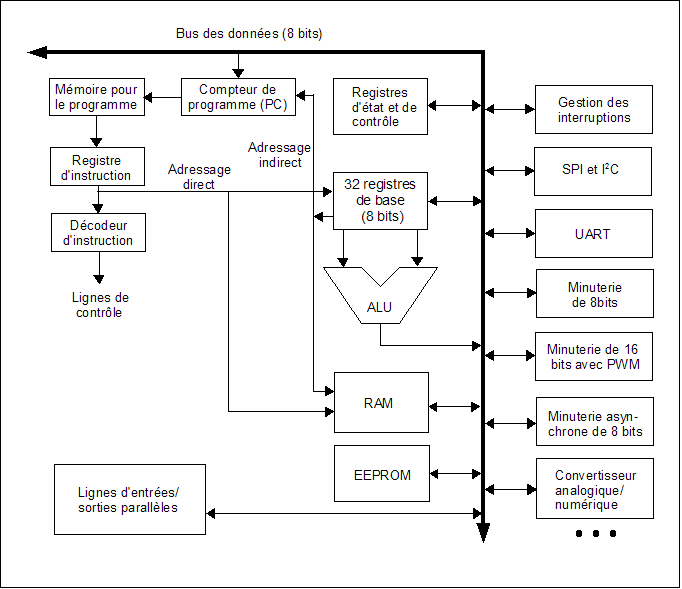
Architecture
générale d'un microcontrôleur AVR
Mais en
premier lieu, qu'est-ce qu'une interruption? L'interruption est
l'une des deux méthodes pour savoir où en est un sous-système,
l'autre étant la scrutation (polling en anglais). Ces
concepts deviennent un peu plus clairs à partir d'exemples. Vous
avez une montre à votre poignet et vous ne devez absolument pas
manquer un rendez-vous important dans 2 heures. Il y a deux façons
de vous y prendre pour gérer votre temps d'ici là tout en
n'oubliant pas votre rendez-vous. La première consiste à regarder
votre montre à intervalles plus ou moins réguliers pour savoir le
temps qu'il reste avant votre rendez-vous. L'autre méthode est
d'ajuster l'alarme sur votre montre pour qu'elle se mette à sonner
juste avant votre rendez-vous pour vous avertir qu'il est temps de
vous y rendre. La scrutation caractérise la première méthode
alors que la seconde peut assez bien représenter ce qu'est une
interruption. Avec la scrutation, le système principal demande à
un sous-système de lui dire où il en est rendu dans sa tâche alors
que par interruption, le sous-système avertit lui-même la partie
principale de la fin d'une étape importante (et peut-être finale)
de sa tâche. Dans la programmation des microcontrôleurs, les 2
méthodes sont employées pour synchroniser des opérations, entre
elles ou par rapport à un déroulement principal.
Depuis
le début du projet, vous avez employé la scrutation pour arriver à
savoir si le bouton-poussoir sur la carte avait été enfoncé par
l'utilisateur pour changer la couleur de la DEL. Par contre, vous
auriez pu avoir recours à la programmation par interruption pour
arriver aux mêmes fins. C'est d'ailleurs ce que vous devrez faire
plus loin comme exercice. La facilité de la programmation par
scrutation vient du fait que le code suit une évolution prévisible
puisque la succession des opérations est dictée ligne par ligne
dans un déroulement linéaire. Avec les interruptions, ce
cheminement est moins évident puisque le cours de l'évolution du
programme peut être changé à tout moment pour répondre aux
actions prévues par une interruption. Ce n'est pas tout. Une fois
que les instructions d'une interruption ont été accomplies, il faut
revenir au déroulement de ce qui était en cours juste avant
l'interruption. Vous savez tous comment il peut être difficile de
se replonger dans la lecture d'un document après avoir été
interrompu par un coup de téléphone inattendu. Le principe est le
même, il faut prendre le temps de noter où on en était avant
l'interruption pour éventuellement pouvoir retourner au déroulement
de l'action principale au point où on l'avait laissée. Dans le cas
de la lecture d'un livre, on laissera un signet au bon endroit dans
le livre. Dans le cas des processeurs, on sauvegarde le contenu de
certains registres pour les recharger avec les bonnes valeurs après
l'interruption. Heureusement, le compilateur que nous utiliserons
ici se chargera pour nous de bien gérer lui-même les registres lors
d'interruptions ce qui nous facilitera la tâche.
Pour en
revenir à notre figure montrant l'architecture de l'AVR, on peut
donc dire de façon générale que les périphériques de la partie
droite et l'unité centrale sur la gauche peuvent se synchroniser en
utilisant soit une approche par scrutation ou soit par interruption.
Généralement, des registres spéciaux sont ajustés par
programmation pour permettre ou non à certaines interruptions d'agir
sur le déroulement du programme si on le souhaite. Si on préfère
la scrutation, le programme ira voir lui-même l'état de certains
autres registres pour voir ce qui se passe avec les périphériques
internes.
Remarque
très importante
Atmel
est une compagnie qui a été achetée par la rivale Microchip. En
octobre de la même année, la documentation du microcontrôleur a
subi une révision.
Malheureusement, certaines modifications ont été introduites qui
font que la version 2.00 de la librairie AVRLibC ne fonctionne par
avec cette révision. Nous vous recommandons donc vivement de
prendre la version
2015 du même document. Le bas de page de la documentation, vers
la droite, vous indique le mois et l’année de la date de
publication.
Il
vous faudra consulter régulièrement ce fichier PDF au cours de la
session. Il est recommandé de la placer dans votre compte pour
éviter de le télécharger inutilement à répétition. Éviter
également de le placer sous Git où il prendra trop d’espace
inutilement. Si vous voulez
vraiment aller plus loin avec Linux, vous pouvez par contre créer un
alias
qui permet de démarrer un visualisateur de fichier PDF (comme
evince,
par exemple) pour accéder à
la documentation plus rapidement. Vous
pouvez par la suite placer cet alias dans votre .bashrc,
qui, lui, devra être dans la
racine de votre compte Linux.
Ceci est un sujet plus avancé qui ne fait pas directement partie du
cours, mais qui permet d'approfondir votre connaissance de Linux
tranquillement. Rien
d’obligatoire sur ce point.
Problèmes
Problème
1: Contrôle d'une del par interruption
Il vous
faudra reprendre le code écrit pour le problème 2 de la semaine 2.
Il vous faudra effectuer des modifications pour en arriver à un
contrôle par interruption plutôt que par scrutation comme vous
l'avez fait la première fois, sans trop le savoir:
<avr/interrupt.h>:
Interrupts
Il
vous faudra adapter la déclaration de la variable décrivant l'état
de la machine à état fini pour inclure l'attribut «volatile».
CHAQUE FOIS QU'UNE VARIABLE GLOBALE EST MODIFIÉE DANS UNE ROUTINE
D'INTERRUPTION, ELLE DOIT AVOIR CET ATTRIBUT «VOLATILE».
Considérez-vous averti! Il se peut que vous ayez à modifier
d'autres variables de la même manière. Les raisons de cette
modification sont un peu complexes. Mentionnons simplement qu'elles
ont à voir avec les optimisations de votre code effectuées par le
compilateur:
volatile
uint8_t gEtat = 0; // selon le nom de votre variable
//
placer le bon type de signal d'interruption
//
à prendre en charge en argument
ISR
( 'modifier ici' ) {
//
laisser un délai avant de confirmer la réponse du
//
bouton-poussoir: environ 30 ms (anti-rebond)
_delay_ms
( 30 );
//
se souvenir ici si le bouton est pressé ou relâché
'modifier
ici'
//
changements d'état tels que ceux de la
//
semaine précédente
'modifier
ici'
//
Voir la note plus bas pour comprendre cette instruction et son rôle
EIFR
|= (1 << INTF0) ;
}
void
initialisation ( void ) {
//
cli est une routine qui bloque toutes les interruptions.
//
Il serait bien mauvais d'être interrompu alors que
//
le microcontrôleur n'est pas prêt...
cli
();
//
configurer et choisir les ports pour les entrées
//
et les sorties. DDRx... Initialisez bien vos variables
'modifier
ici'
//
cette procédure ajuste le registre EIMSK
//
de l’ATmega324PA pour permettre les interruptions externes
EIMSK
|= (1 << INT0) ;
//
il faut sensibiliser les interruptions externes aux
//
changements de niveau du bouton-poussoir
//
en ajustant le registre EICRA
EICRA
|= 'modifier ici' ;
//
sei permet de recevoir à nouveau des interruptions.
sei
();
}
La
routine ISR ne peut pas être interrompue durant son déroulement
par une autre interruption (à part le reset et quelques
autres, celles que la documentation sur le ATmega324PA qualifie de
"type 2" - section AVR CPU Core – 7.7 Reset and
Interrupt Handling, page 16 et suivantes). La documentation
d'AVRLibC donne la même information. Bien entendu, l'utilisateur
peut choisir le comportement inverse en utilisant "#define
ISR_NOBLOCK" si l'on doit prendre en charge des interruptions
réentrantes, ce qui n'est pas toujours désirable. La
documentation du ATmega324PA mentionne:
«When
an interrupt occurs, the Global Interrupt Enable I-bit is cleared and
all interrupts are disabled. The user software can write logic one
to the I-bit to enable nested interrupts. All enabled interrupts can
then interrupt the current interrupt routine. The I-bit is
automatically set when a Return from Interrupt instruction – RETI –
is executed.»
Donc,
si un second signal d'interruption arrive durant l'exécution de
ISR, l'AVR s'en souvient (le bit INTF0 est activé dans le EIFR) et
la routine ISR sera exécutée une seconde fois, une fois la
première terminée... Ces extraits de la documentation (pages 16
et 17) résument exactement le comportement du mécanisme des
interruptions avec les AVR:
«...
Interrupt Flags can also be cleared by writing a logic one to the
flag bit position(s) to be cleared. If an interrupt condition occurs
while the corresponding interrupt enable bit is cleared, the
Interrupt Flag will be set and remembered until the interrupt is
enable, or the flag is cleared by software. Similarly, if one or
more interrupt conditions occur while the Global Interrupt Enable bit
is cleared, the corresponding Interrupt Flags(s) will be set and
remembered until the global interrupt enable bit is set, and will
then be executed by order of priority.»
«When
the AVR exits from an interrupt, it will always return to the main
program and execute one more instruction before any pending interrupt
is served.»
Problème
2: Jeu de réflexe avec l'utilisation d'une minuterie
Le
défi est de concevoir un jeu de réflexe. Quand le microcontrôleur
démarre, il attend 10 secondes et fait clignoter la lumière rouge
pendant 1/10 de seconde. Quand la lumière est éteinte, le joueur
doit peser sur le bouton aussitôt que possible. Si le joueur pèse
sur le bouton à l'intérieur d'une seconde, la DEL devient verte. Si
le joueur pèse sur le bouton passé une seconde ou ne pèse pas du
tout, la lumière prend la couleur rouge. Dans un cas comme dans
l'autre, la DEL conserve sa couleur indéfiniment. Il faut peser sur
reset pour recommencer.
Le
délai maximum d'une seconde pour permettre à l'utilisateur de peser
sur le bouton sera calculé par le compteur de la minuterie qui
générera une interruption après la période de temps allouée.
Les autres délais (celui de 1/10 de seconde et de
10 secondes) peuvent être faits avec des fonctions de délais ou par
la minuterie, comme bon vous semble. La détection du
bouton-poussoir se fera également en détectant une interruption
externe, tout comme pour l'exercice précédent. Voici une
procédure:
volatile
uint8_t gMinuterieExpiree;
volatile
uint8_t gBoutonPoussoir;
ISR
( 'modifier ici' ) {
gMinuterieExpiree
= 1;
}
ISR
( 'modifier ici' ) {
gBoutonPoussoir
= 1;
//
anti-rebond
'modifier
ici'
}
Pour
arriver à avoir une interruption de la minuterie («timer»), on
doit ajuster des registres. On placera tout ce qu'il faut dans une
routine qu'on appellera au moment opportun. Il faudra fouiller dans
la documentation d’Atmel pour
savoir comment le tout peut être ajusté:
void
partirMinuterie ( uint16_t duree ) {
gMinuterieExpiree
= 0;
//
mode CTC du timer 1 avec horloge divisée par 1024
//
interruption après la durée spécifiée
TCNT1
= 'modifier ici' ;
OCR1A
= duree;
TCCR1A
= 'modifier ici' ;
TCCR1B
= 'modifier ici' ;
TCCR1C
= 0;
TIMSK1
= 'modifier ici' ;
}
do
{
//
attendre qu'une des deux variables soit modifiée
//
par une ou l'autre des interruptions.
}
while ( gMinuterieExpiree == 0 && gBoutonPoussoir == 0 );
//
Une interruption s'est produite. Arrêter toute
//
forme d'interruption. Une seule réponse suffit.
cli
();
//
Verifier la réponse
'modifier
ici'
Problème
3: Le PWM de façon matérielle
Lorsque
l’on voudra que les roues d’un robot avancent de façon autonome,
il sera fastidieux de générer une onde PWM de la façon dont vous
l'avez fait la semaine dernière (semaine 3) puisque le
microcontrôleur sera occupé à faire bien d'autres choses. Il
vaudra mieux utiliser les ressources internes pour arriver au même
but.
Le
timer1 du ATmega324PA possède un mode de fonctionnement qui permet
de générer 2 signaux et de les faire sortir directement sur des
broches du port D. Il vous faudra peut-être ajuster votre matériel
dans SimulIDE pour utiliser les bons ports dans les branchements vers
le pont-en-H. On utilisera donc cette minuterie, mais cette fois, il
n'y a pas lieu de générer d'interruption. Les moteurs peuvent
fonctionner tout seuls sans autre assistance. Plus tard dans le
projet, il faudra ajuster la vitesse des roues pour arriver à
tourner, mais ce détail a peu d'intérêt pour l'instant. Par
contre, tout comme la semaine passée, il vous faudra donner un
signal de direction au circuit du pont en H. Le seul détail qui
change par rapport à la semaine précédente est la fréquence du
signal PWM. On se contentera d'une seule fréquence (donnée plus
bas), mais on continuera de générer des signaux PWM de 0%, 25%,
50% et 75% et 100% pour des durées de 2 secondes chacun. Le rapport
a/b du PWM sera réglé en passant correctement un ou des arguments
de la fonction. Ces arguments permettront d'ajuster certains
registres spéciaux.
void
ajustementPwm ( 'modifier ici' ) {
//
mise à un des sorties OC1A et OC1B sur comparaison
//
réussie en mode PWM 8 bits, phase correcte
//
et valeur de TOP fixe à 0xFF (mode #1 de la table 16-5
//
page 130 de la description technique du ATmega324PA)
OCR1A
= 'modifier ici' ;
OCR1B
= 'modifier ici' ;
//
division d'horloge par 8 - implique une fréquence de PWM fixe
TCCR1A
= 'modifier ici' ;
TCCR1B
= 'modifier ici' ;
TCCR1C
= 0;
}
La
routine principale (main) appellera tout simplement la procédure
ajustementPwm et s'assurera que les ports de sortie (surtout le port
D) soient bien ajustés. Il est toujours bon de consulter le haut
de la page 3 du document d'Atmel pour avoir une figure illustrant
les broches de l’AVR.
Comme
il y a deux moteurs sur le robot, il faut générer deux signaux
PWM. Le timer1, tel qu'ajuster dans la routine ajustementPwm, en
générera justement deux. Il est important de garder en tête le
schéma de figure 16-1 à la page 108 puisqu'il montre que les OC1A
et OC1B sont les sorties PWM.
Une
assignation correcte du registre TCCR1A fait en sorte que certains
ports ne sont plus accessibles en sortie puisque OC1A et OC1B sont
sélectionnées par le multiplexeur de la figure 16-5 à la page
118.
Les
minuteries 0 et 2 (timer0 et timer2) sont très semblables à la
minuterie 1 dans leur fonctionnement de base, mais il y a des
différences avec certains modes plus avancés. La plus grande
différence est peut-être que les minuteries 0 et 2 sont de 8 bits
seulement, mais elles peuvent aussi générer chacune deux signaux
PWM directement sur des broches en sortie. Elles font l’objet des
chapitres 15 et 17 respectivement plutôt que du chapitre 16. Vous
pourriez en avoir besoin plus tard dans le projet final.
Ressources
supplémentaires
Le
document
de Philippe Proulx devrait déjà vous être familier à ce
point-ci, mais il n’est jamais trop tard pour commencer à le
consulter, surtout pour ce travail pratique. Le site MaxEmbbeded
est une ressource de premier choix également, en particulier sa
section
sur les minuteries!
Le
saviez-vous (rappel!) ?...
L’éditeur
VS Code peut être contrôlé très rapidement à l’aide de
combinaisons de touches au clavier sans avoir à utiliser la souri et
les menus. Certains programmeurs aiment en avoir une liste
sous forme de fiche pour une consultation rapide.
La
qualité du code
Opérer
si près des bits et des registres renforce l’importance de règles
de la qualité du code… tout en plaçant des bémols sur certaines!
La règle 10 prévoit d’utiliser l’opérateur :: pour référer
aux variables globales. Une plus vieille est d’utiliser un g
en préfix du nom de la variable (pour globale) pour bien marquer
cette particularité. Cette plus vieille façon de faire est plus
proche d’un style langage C pur alors que celle de la règle 10 est
beaucoup plus dans le style C++. Souvent, en embarqué, on risque de
travailler avec de plus vieilles librairies qui sont plus proches du
langage C. Certaines respecteront très peu les règles de qualité
du code, purement et simplement...
Même
sans l’utilisation de l’orienté objet dans ce travail pratique,
on remarque tout de même l’importance de la règle 19 prend de
l’importance avec la configuration du matériel.
Les
règles 44 à 46 touchent vraiment les sujets discutés ici. Par
contre, on se trouve exactement dans la situation où on n’a pas le
choix d’utiliser les variables et fonctions globales. Par contre,
dans plusieurs situations à venir dans le cours, on sera tenté
d’utiliser les variables globales pour d’autres usages que de
gérer une routine d’interruption. Il faudra éviter de succomber
à cette tentation!
Les
règles 61 et 62 sont intéressantes, mais aussi assez intuitives.
La règle 60 est cependant capitale pour ce qu’on fait dans ce
travail pratique. Il faut éviter les chiffres qui ne signifient
rien à la lecture et qu’il faut définir nous-mêmes ou, encore
mieux, utiliser les valeurs déjà définies pour nous dans AVRLibC.
Un exemple expose mieux ce point:
// mauvais, difficile à relire et à
«décortiquer» :
REGISTER
= 0x1A;
// imparfait, mais déjà mieux…
REGISTER
= 1 << 4
| 1 << 3
| 1 << 1;
// Le mieux qu’on puisse faire:
//
périphérique ABC en mode DEF avec
interruptions GHI, page JKL, …
REGISTER = 1
<< ONSET | 1 << THISON
| 1 << ENABLE;
La
librairie AVLibC définit souvent pour nous ces constantes et
registres dans un fichier .h quelque part (souvent io.h). Il suffit
de les utiliser! Aussi, remarquez la présence du commentaire où sa
précision et son explication facilitent la lecture du code.
On
veut minimiser l’utilisation de commentaires, surtout pour les
choses banales qu’on comprend assez facilement en lisant le code.
Par contre, avec l’assignation de registres où la situation
devient rapidement obscure, de bons commentaires sont nécessaires.
Les règles 85 et 86 sont à relire même si elles sont relativement
faciles à suivre.
Suivi
logiciel et Git
Le
code développé pour résoudre ces trois problèmes devra être
placé dans votre entrepôt Git. Avec 3 problèmes et les
possibilités plus grandes d’explorer aussi par vous-mêmes
beaucoup de variantes possibles dans les modes de fonctionnement,
soumettre une révision (commit) dès qu’un bout de code
fonctionne prend de l’importance. On peut ainsi beaucoup plus
facilement partager le code dans l’équipe de deux et aussi
partager la compréhension associée des concepts impliqués.
Les noms des fichiers et les répertoires où ils doivent être
placés sont laissés à votre discrétion. Vous aurez absolument
besoin de ce code plus tard dans la session. De plus, la matière
étudiée ici est sujette à une évaluation lors du quiz qui
arrivera prochainement. Elle en constituera même la matière
principale.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}