Sources
de tension et alimentation du robot
Les
sources de tension autour des tables de parcours sont d'un modèle
différent de celles installées aux différents postes de travail en
laboratoire. Cependant, elles sont généralement plus simples à
utiliser
Elles
sont manufacturées par B+K
Precison et le modèle est le 1550 (avec fiche technique et
manuel d’utilisateur dans le lien). La source peut être mise en
marche en faisant basculer un interrupteur à l'arrière. Elle n'est
pourvu que d'une seule sortie. Généralement, la source est déjà
ajustée à la bonne valeur de tension de sortie, mais on peut
l'augmenter ou la réduire en jouant sur «+» et «-» à l'avant.
Il y a deux sources par table, une pour alimenter la carte mère
(avec un câble ayant un connecteur 2.1mm) et l'autre pour alimenter
le pont-en-H du robot (deux câbles avec pinces).

Branchement
de la source de tension au pont-en-H
Alimenter
le pont-en-H par une source autre que les piles présente un risque
de court-circuit et peut endommager le robot. Voici tout de même la
façon la plus sécuritaire pour effectuer les branchements.
Pour
brancher le câble d'alimentation positif, en rouge, la meilleure
façon est de souder un court bout de métal sur la borne libre de
l'interrupteur rouge du point-en-H à trois positions sous le robot.
De cette façon, si la borne du milieu est bel et bien reliée au
pont-en-H, on
pourra
osciller sans danger entre l'alimentation par piles et par source de
tension.
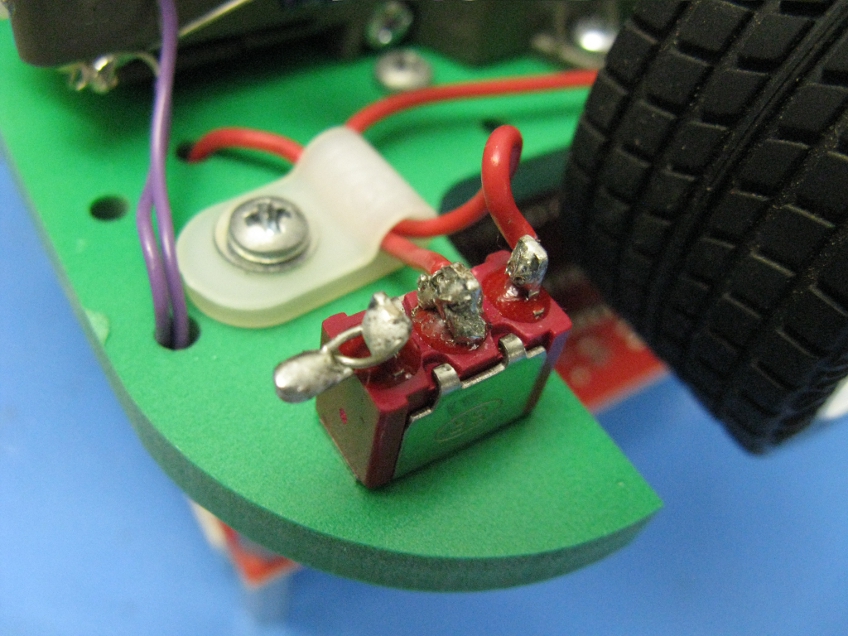
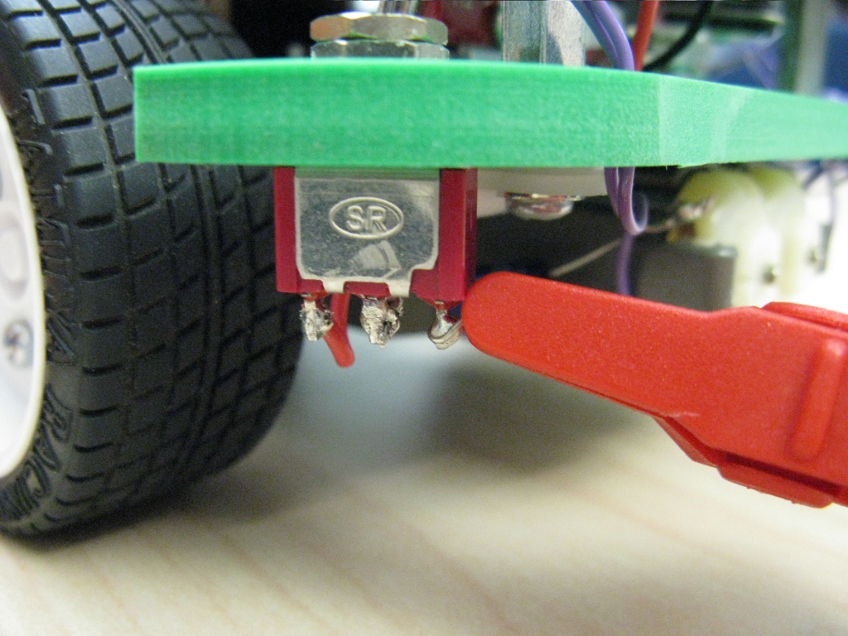
Ce bout
de métal offrira à la pince du câble d'alimentation une prise
ferme comme le montre les photographies. Une autre option est de
pincer directement les bornes de l'interrupteur, mais c'est un peu
plus dangereux.
Le câble
noir de la source d'alimentation devra quant à lui être relié à
la masse du pont-en-H. La meilleure solution est probablement de
placer une vis sur le dessus de la tige arrière droite qui maintient
la carte mère en place. La vis offrira une bonne prise à la pince
au bout du câble.
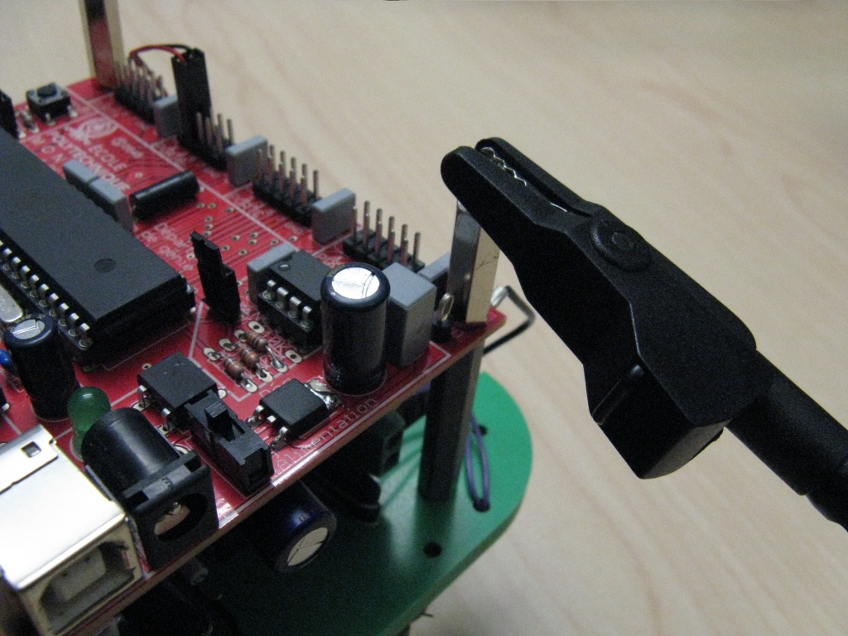
Une
solution de rechange acceptable est de placer la pince directement
sur le point de test noir (ground) du pont-en-H. Ne pas trop
enfoncer la pince profondément pour éviter qu'elle ne touche les
broches de la puce SN754410 au centre. Il n'y a pas trop d'autres
pièces aux alentours que la pince pourrait toucher. Il faut tout de
même être prudent avec l'insertion et le retrait des pinces sur le
robot.
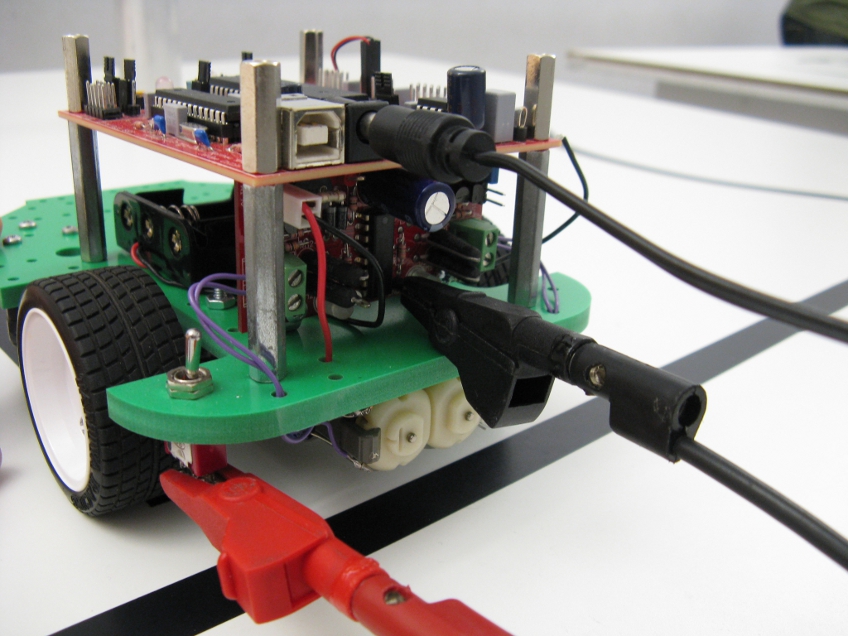
Voici
une photographie de l'alimentation complète d'un robot par deux
sources avec tous les branchements complétés.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}