Capteurs,
actionneurs et autres composantes
Ce texte
présente les capteurs, les actionneurs et autres composants qui
peuvent être montés sur le robot. Des références aux documents
techniques sont également présentées. Le texte est enrichi de
plusieurs photographies afin de faciliter le montage sur le robot.
De plus, la rubrique de Wikipédia
sur les capteurs est très intéressante si on recherche plus
d'information sur le sujet.
Mise
en garde
Un
capteur est également un circuit électrique fragile. Avant de
le brancher n'importe comment à la carte mère, il faut faire une
lecture attentive de la documentation du manufacturier. C'est
souvent l'unique point de départ disponible. Par la suite, il faut
voir comment on peut l'interfacer à la carte. L'utilisation
d'interruptions, de la scrutation, du convertisseur
analogique-numérique ou de tout autre périphérique doit faire
l'objet d'une analyse approfondie avant toute chose. Parfois, pour
bien confirmer l'approche retenue, on peut avoir recours au
multimètre et à l'oscilloscope, dans le but de bien visualiser les
signaux ou les tensions électriques impliqués. Plus
fondamentalement peut-être, une discussion avec un ou plusieurs
membres de l'équipe est probablement une étape souhaitable pour
s'assurer que la compréhension est la même pour tous.
Capteurs
(entrées) – Références et fiches techniques
Manettes
Actionneurs
et autres (sorties)
Documents
complémentaires d'intérêt
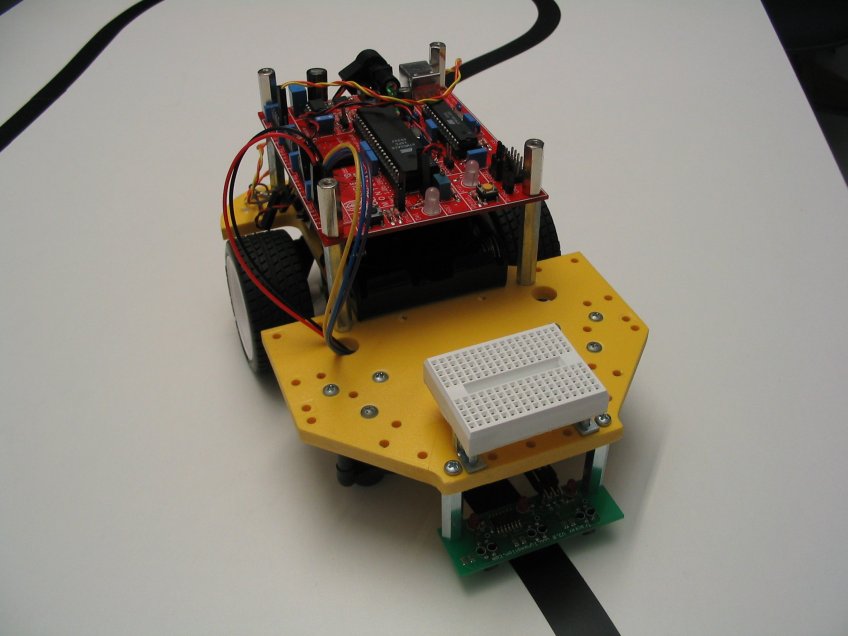
Montage
de capteurs sur le robot
Quelques
photographies sont nécessaires pour comprendre comment
placer un support de capteur sur le robot. Il existe des
variantes de montage suivant le but poursuivi et la nature des
informations à discerner dans l'environnement immédiat. Le but est
d'illustrer la flexibilité qu'offre le robot dans la disposition que
peut avoir un capteur selon les situations dans lesquelles
on lui demande d'opérer.
Les
capteurs
infrarouges doivent souvent opérer près des objets à détecter
et doivent donc être disposés de façons particulières.
Les
servomoteurs et les régulateurs de tension sont relativement
gros par rapport à la taille du reste du robot. Ils doivent donc
être placés en certains endroits précis
sur le robot.
Enfin,
le montage
de capteurs sur le breadboard est également expliqué, de même
que le montage
d'autres capteurs.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}