Introduction
au robot et à sa programmation
Le
cours INF1900 est un projet intégrateur qui vise à mettre en
pratique des notions acquises dans d'autres cours de première année
en génie informatique et en génie logiciel. Ce projet consiste à
programmer un robot qui est, en réalité, un petit mobile pouvant
suivre des parcours variés selon ce que ses capteurs détectent dans
son environnement immédiat.
Le
robot
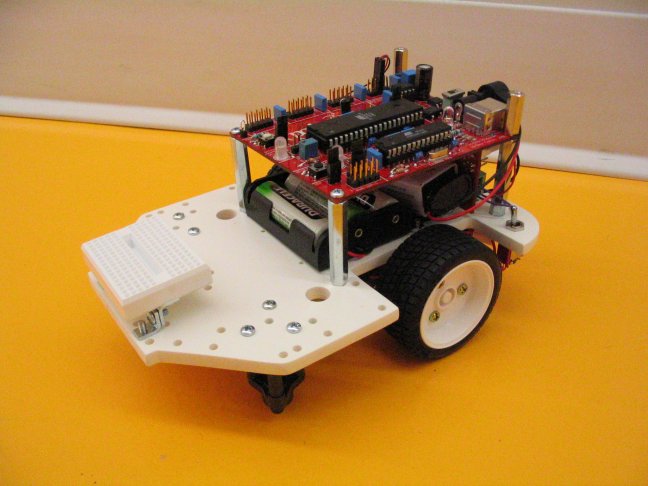
Un robot
possédant deux roues motrices et deux roues libres représente une
application de base de la robotique. Généralement, un tel robot
suit un parcours plus ou moins complexe déterminé par une ligne
noire tracée sur un grande table, une source de lumière ou de son,
ou encore par de petits murs qui forment un labyrinthe par exemple.
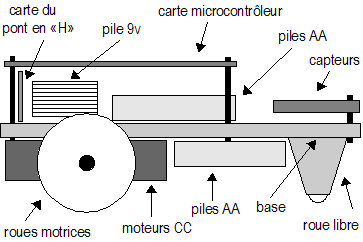
La
figure montre un schéma simplifié du profil du robot. Il est formé
d'une base à laquelle se greffe les composantes principales à
l'aide de vis et de bagues d'espacement (spacers) représentées
en noir.
L'ensemble
moteurs à courant continu (CC), engrenages et roues motrices: il
s'agit d'un ensemble disponible commercialement. Ces pièces
forment un tout bien intégré qui permet une réduction des coûts.
La
roue libre: une bille encastrée dans un boîtier de plastique mais
qui conserve sa mobilité (roulette boule ou roulette pivotante de
type boule en français ou encore «ball caster» en
anglais).
La
carte microcontrôleur: il s'agit d'une plaque de circuit imprimé
sur laquelle prends place un microcontrôleur Atmel AVR ATMega324PA
ayant 4 ports numériques de 8 bits dont un peut être converti en
port analogique. Cette carte mère est un petit ordinateur autonome
qui est programmable par port USB.
La
carte du pont en H: c'est une carte de circuit imprimé sur
laquelle repose un circuit classique d'amplificateur appelé pont en
H utilisé couramment pour le contrôle des moteurs CC. Il n'est
cependant pas essentiel de comprendre son fonctionnement pour
arriver à programmer le robot.
Les
capteurs: cette partie pourra être très différente selon le type
de parcours effectué par le robot puisque différents types de
capteurs pourront être utilisés. Ce pourra donc être un sonar ou
encore un détecteur de distance ou de couleurs. Dans d'autres cas,
il pourra même s'agir d'une plaque de métal qui sert de support à
un capteur et son boîtier.
Les
piles: deux types de piles sont requis sur le robot. Une pile 9
Volts alimente la carte microcontrôleur et les capteurs, et un
ensemble de 6 piles AA fournit la puissance exclusivement aux
moteurs.
Programmation
La
programmation demeure l'aspect le plus important du projet étant
donné que le cours s'adresse à des étudiants en génie
informatique et en génie logiciel. Le robot sera programmé en C et
C++. Du code assembleur pourra également être inclus au besoin.
La lecture et l'écriture sur des ports analogiques et numériques,
le contrôle du comparateur PWM et des minuteries (timers) et
l'adressage d'une mémoire seront les principales notions
introduites. Il faudra donc appliquer certains principes de
fonctionnement des microprocesseurs et des systèmes numériques.
Une boucle infinie effectuera continuellement une lecture des
capteurs pour réajuster la vitesse et la direction des moteurs et
ainsi créer un système en boucle fermée. De plus, des notions de
mathématiques pourront éventuellement être nécessaire pour
résoudre certains problèmes de calculs de trajectoires et de
distances.
Pour ce
qui est des outils de programmation des microcontrôleurs Atmel AVR,
il y a un ensemble GCC, Binutils, AVRLibC (pour la compilation), et
AVRDude (pour le chargement sur la carte mère). La programmation par
port USB simplifie grandement le chargement des programmes sur le
robot. Des notions de C/C++, de même que des méthodes de génie
logiciel, seront constamment utilisées pour arriver à un bon
guidage du robot.
















{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}